基于关键点坐标估算的变弯度机翼后缘形状重构方法研究
基金项目:
国家科技部重点研发计划(2021YFF0501800);科研项目“XX数字孪生技术”(JCKY2024205A012)
中图分类号:
V24
文献标识码:
A
流转信息 | 收稿日期 : 2025-11-04 退修日期 : 2025-11-20 录用日期 : 2025-12-17 |
引用格式
引文格式:王文娟, 刘元博, 张梦杰, 等. 基于关键点坐标估算的变弯度机翼后缘形状重构方法研究[J]. 航空制造技术, 2026, 69(5): 25010159.
摘要
为实现变弯度机翼后缘外形实时感知,支撑机翼外形的闭环控制,本文以一种指关节式变弯度后缘为研究对象,提出了基于光纤光栅传感器的形状重构方法。首先设计了一种光纤梁,通过几个支撑件与后缘翼肋相连,利用激光跟踪仪等手段测量后缘偏转不同角度时后缘外形数据和关键点坐标数据,建立光纤光栅测得的应变数据与二者的映射关系。将后缘结构的变形简化为一种三关节串联机器人模型,通过利用后缘结构已知尺寸信息,对关键点坐标数据进行逆向解算得到各关节转动角度,利用正运动学求解后缘的当前姿态,实现后缘形状的重构。基于后缘地面试验数据开展形状重构算法的验证工作,以后缘偏转角度作为重构精度指标,重构后缘偏度与激光跟踪仪所测后缘偏度的相对误差为1.57%,验证了该方法的准确性和可行性,为柔性大变形机翼的实时形状感知提供一种可行的思路和手段。
关键词
变弯度机翼后缘;光纤光栅;形状重构;全尺寸试验;正运动学;
A Methodology for Shape Reconstruction of Morphing Wing Trailing Edge Based on Key Point Coordinate Estimation
Citations
WANG Wenjuan, LIU Yuanbo, ZHANG Mengjie, et al. A methodology for shape reconstruction of morphing wing trailing edge based on key point coordinate estimation[J]. Aeronautical Manufacturing Technology, 2026, 69(5): 25010159.
Abstract
To enable real-time perception of the shape of morphing trailing edge and support closed-loop control of wing profiles, this study focuses on a finger-joint-style variable camber trailing edge. A shape reconstruction method based on fiber Bragg grating (FBG) sensors is proposed. First, an FBG deformation sensor was designed to connect with the trailing edge ribs via supporting components. Using laser tracking and other measurement techniques, the geometry data and key-point coordinates of the trailing edge were recorded at different deflection angles, establishing a mapping relationship between the strain data measured by the FBG sensor and these parameters. The deformation of the trailing edge structure is modeled as a three-joint serial robotic system. By leveraging known dimensional information of the trailing edge, the joint rotation angles are calculated via inverse kinematics using key-point coordinate data. Forward kinematics is then employed to determine the current configuration of the trailing edge, achieving shape reconstruction. The relative error between the reconstruction and the actual trailing edge deflection rotation angle is 1.57%, which confirms the feasibility and accuracy of this approach for real-time shape perception of flexible large deformation wings.
Keywords
Morphing trailing edge
随着航空业对节能减排和环境友好的需求凸显,柔性大变形机翼尤其是变弯度机翼技术逐渐成为研究热点[
李琦, 杨宇, 王志刚, 等. 柔性变形翼结构设计、建模与分析研究进展[J]. 航空科学技术, 2024, 35(6): 1-11.LI Qi, YANG Yu, WANG Zhigang, et al. Research progress on the design, modeling and analysis of flexible deformable wing structures[J]. Aeronautical Science & Technology, 2024, 35(6): 1-11.
王文娟, 薛景锋, 张梦杰, 等. 基于光纤传感的结构变形实时监测技术研究[J]. 航空科学技术, 2022, 33(12): 97-104.WANG Wenjuan, XUE Jingfeng, ZHANG Mengjie, et al. Research on real-time monitoring technology of structural deformation based on optical fiber sensing[J]. Aeronautical Science & Technology, 2022, 33(12): 97-104.
SUN G K, WU Y P, LI H, et al. 3D shape sensing of flexible morphing wing using fiber Bragg grating sensing method[J]. Optik, 2018, 156: 83-92.
1-4
形状感知技术对变弯度机翼的应用至关重要,精确感知机翼在飞行状态下的变形状态,并实时反馈控制系统进行形状的修正,是实现外形自适应、保持最优气动性能的关键。目前的光学及角度传感器测量机翼偏转角的方式只适用于刚性结构和地面场所,无法满足飞行中实时测量机翼变形的要求。光纤光栅应变传感器因其结构灵巧、抗电磁干扰、波分复用分布式测试等特性成为飞行状态下柔性大变形机翼变形监测的优选传感器[
LI H, ZHU L Q, SUN G, et al. Deflection monitoring of thin-walled wing spar subjected to bending load using multi-element FBG sensors[J]. Optik, 2018, 164: 691-700.
5-6
Chan P. Fiber optics sensing system (FOSS) at NASA armstrong flight research center (AFRC): Summary and recent deployments[R]. Washington: National Aeronautics and Space Administration, 2018.
7-8
9
10
3
11
12
13
14
利用光纤光栅传感器应变数据进行变形测量的主流方法是基于某种力学理论建立结构的应变-位移模型,进而将测得的应变转化为结构变形数据。典型的方法包括逆有限元法、ko位移法和模态叠加法,其中逆有限元法根据几何特点对结构进行离散单元划分,利用如mindlin厚板理论等力学模型建立应变-位移关系,但单元位移场重构依赖多向表面应变输入;ko位移法假设被测结构遵循欧拉-伯努利梁方程,需要满足纯弯曲假设,局限性较大;模态叠加法假设结构变形为不同阶模态变形的线性叠加,需要高精度的结构模型,对模态分析精度、传感器位置和材料性能参数等信息提出了很高要求[
GHERLONE M, CERRACCHIO P, MATTONE M. Shape sensing methods: Review and experimental comparison on a wing-shaped plate[J]. Progress in Aerospace Sciences, 2018, 99: 14-26.
TESSLER A, ROY R, ESPOSITO M, et al. Shape sensing of plate and shell structures undergoing large displacements using the inverse finite element method[J]. Shock and Vibration, 2018, 2018(1): 8076085.
BISCOTTI V, ROY R, GHERLONE M. Shape monitoring of morphing wing structures using the inverse Finite Element Method[J]. Computers & Structures, 2025, 309: 107652.
15-18
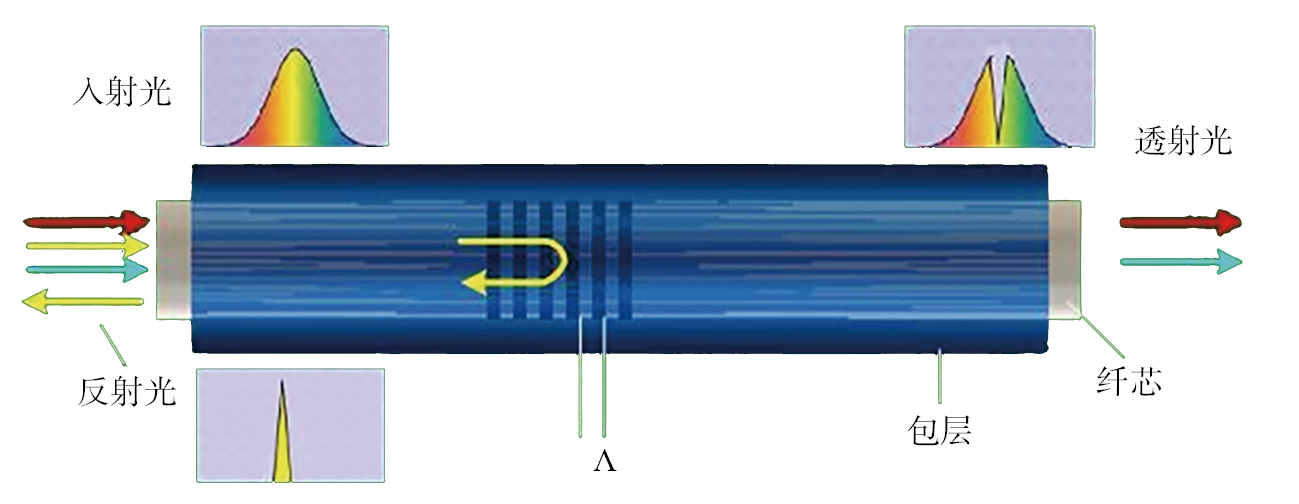
光纤光栅是一种对应变敏感的光纤传感器件,通过光刻技术在光纤上获得不同中心波长的光栅,并将光纤光栅为敏感器件封装成应变传感器,采用波分复用技术获取应变信息,可实现单根光纤对几十个应变测点的测量。
光纤光栅应变测量原理如图1所示,宽带光入射光纤光栅串,每经过一个光纤光栅,就反射回与其中心波长对应的窄带光,而光纤光栅的中心波长随其应变及温度状态发生偏移,在式(1)和(2)中,通过对回光波长的检测来获得对应光纤光栅节点的应变变化。为区分各节点测量值,光纤光栅串由一系列不同中心波长的光纤光栅组成,采用波分复用技术来实现高效的应变测量。

式中,ΔλB为光纤光栅回光波长的改变量;λB为光纤光栅中心波长;ρα为光纤的弹光系数;Δε为应变改变量;ξ为光纤的热光系数;Δt为温度改变量。
由式(1)可以得到

式中,Kε为光纤光栅应变灵敏度;Kt为光纤光栅温度灵敏度。
由于有温度灵敏度的影响,因此在室温应变校准时环境温度的控制非常重要。
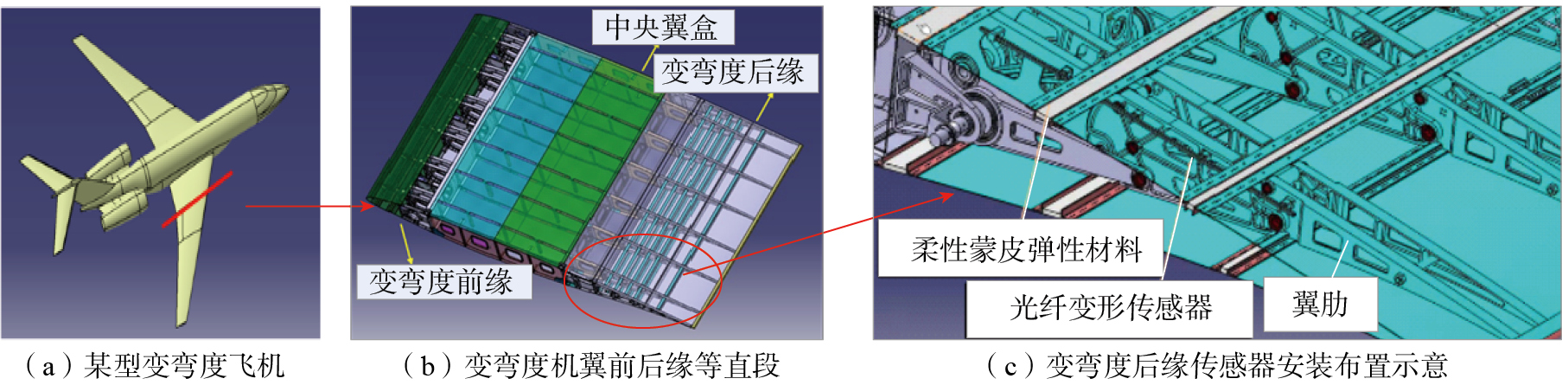
本文选取的指关节式变弯度机翼后缘结构为某型变弯度飞机机翼的一个剖面等直段,如图2所示,由于结构弹性较大,在载荷作用下仅通过构建驱动点位移与变形的关系,难以准确测量结构变形,若将光纤光栅传感器直接布置在蒙皮上表面,会直接影响后缘表面光滑度和隐身效果,不满足飞机结构在线测试的需求;若直接将光纤光栅传感器布置在蒙皮内侧,则光纤光栅布置时会受到柔性蒙皮连接处弹性材料的阻挡,不方便引线,后缘模型如图2所示,若在柔性蒙皮弹性材料处打孔则会影响后缘的结构性能。因此,在后缘的翼肋上布置光纤变形传感器是一种优选的安装方式。
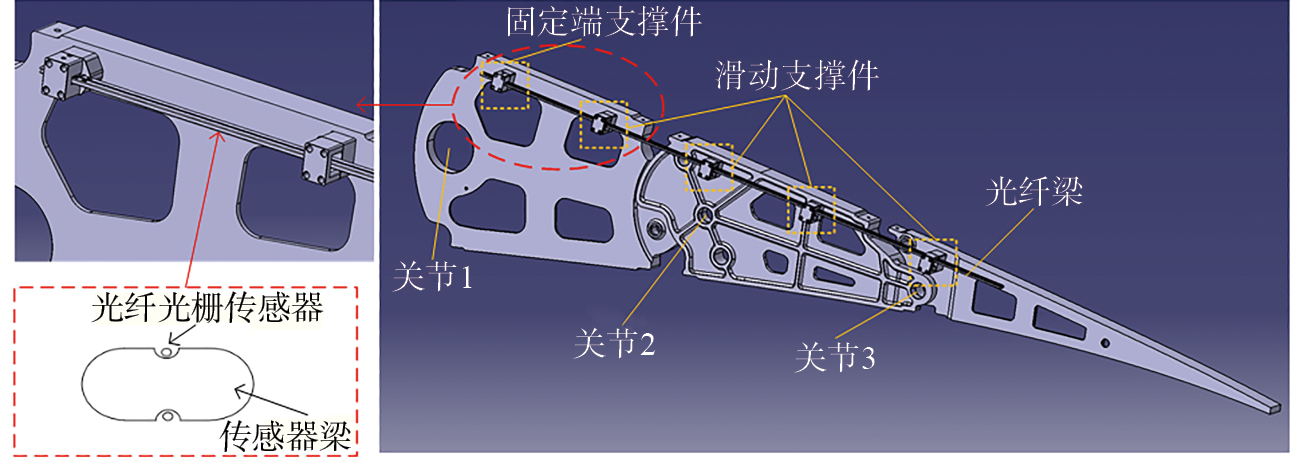
对于指节式变弯度机翼后缘,其结构表面变形由3段指节的刚体位移和相邻指节连接处的柔性蒙皮变形构成,难以仅通过蒙皮表面应变建立应变与结构整体变形的关系,导致逆有限元法等理论方法难以适用,因此采用间接测量的方式,将结构的整体变形传递到一根柔性梁上,由柔性梁的变形来反映整体变形情况。根据该测量原理,为使用尽可能少的光纤光栅实现对后缘变形情况的感知,设计一种变形传感器,将一根柔性梁上下表面对称刻槽,以安装两根光纤光栅的方式形成光纤梁,变形传感器的光纤梁截面示意如图3中左下图红色虚线框所示。再通过几个支撑结构将光纤梁固定于机翼后缘的翼肋上,变形传感器在翼肋上的安装布局设计示意如图3所示。因光纤梁与机翼后缘之间的变形传递通过支撑结构来实现,支撑件的结构设计关系到变形测量的准确性,因此将各支撑件的中心视为关键点,基于关键点坐标开展形状重构算法的研究。考虑到后缘翼肋的主体结构可以视为串联的3根连杆,各连杆之间通过转动关节相连,光纤梁布置在翼肋侧面靠近上蒙皮的位置,沿光纤梁方向靠近关节1处布置固定端支撑件以保持光纤梁的一端固定,在关节2和3两侧分别布置滑动支撑件,各支撑件之间的距离相近,使光纤梁的变形均匀,可反映出后缘真实变形情况。完成变形传感器的安装后,通过激光跟踪仪测量变形过程中变弯度机翼后缘的实际外形变化数据(即下偏角度),并建立光纤光栅测得的应变数据与下偏角度之间的映射关系,实现对后缘变形程度的测量。
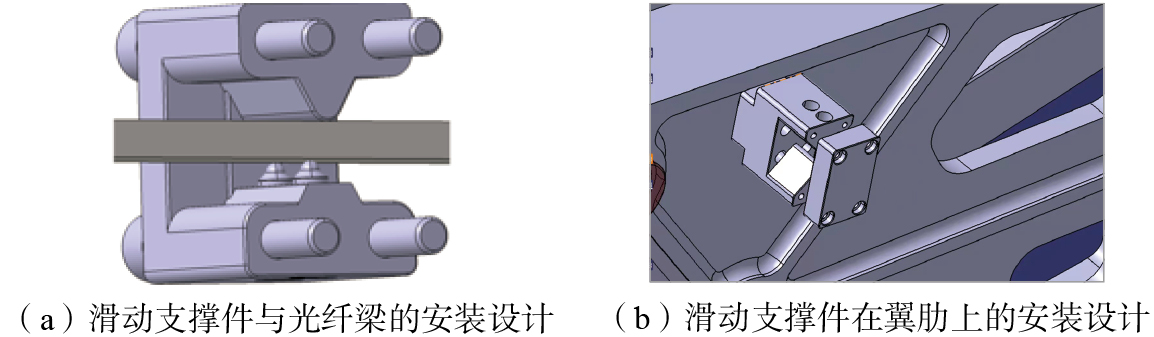
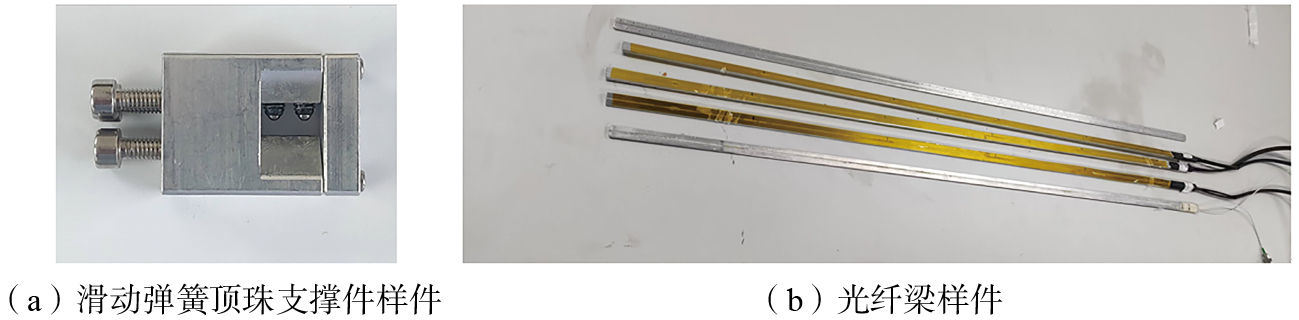
光纤变形传感器包括固定端支撑件、滑动支撑件、光纤梁等,其中滑动支撑件为关键部件,需允许光纤梁在弯曲过程中能够沿轴向自由滑动,并在其他方向上约束其运动以保证变形测量精度,因此依据此要求提出弹簧顶珠方案,弹簧顶珠在光纤梁顶部用弧面产生线接触;在底部采用两个弹簧顶珠与光纤梁产生点接触,顶珠可在光纤梁和弹簧的作用下在一定范围内上下移动,实现光纤梁的快速安装和自由滑动,具有较好的配合效果,且可重复使用。滑动支撑件结构设计及其在翼肋上的安装示意如图4所示。
光纤梁和支撑结构均采用轻质铝合金材料,光纤梁尺寸为长750 mm、宽10 mm、厚3 mm,上下两面刻制半圆弧槽,圆弧半径为1 mm,用于安装光纤光栅传感器。光纤光栅采用直径为155 μm、耐300 ℃的聚酰亚胺涂覆光纤,传感器制备首先采用快干胶带对光纤光栅进行预定位,并在光纤一侧利用砝码进行预拉伸,以保证光纤光栅位置的精确固定,之后在光纤光栅处填充环氧型胶黏剂,光栅之间的传输光纤填充硅胶,常温固化24 h,光纤出口处用特氟龙套管和热缩管保护。滑动弹簧顶珠支撑结构和光纤梁实物图如图5所示,部分光纤梁因表面贴了一层聚酰亚胺保护膜显示为黄色。
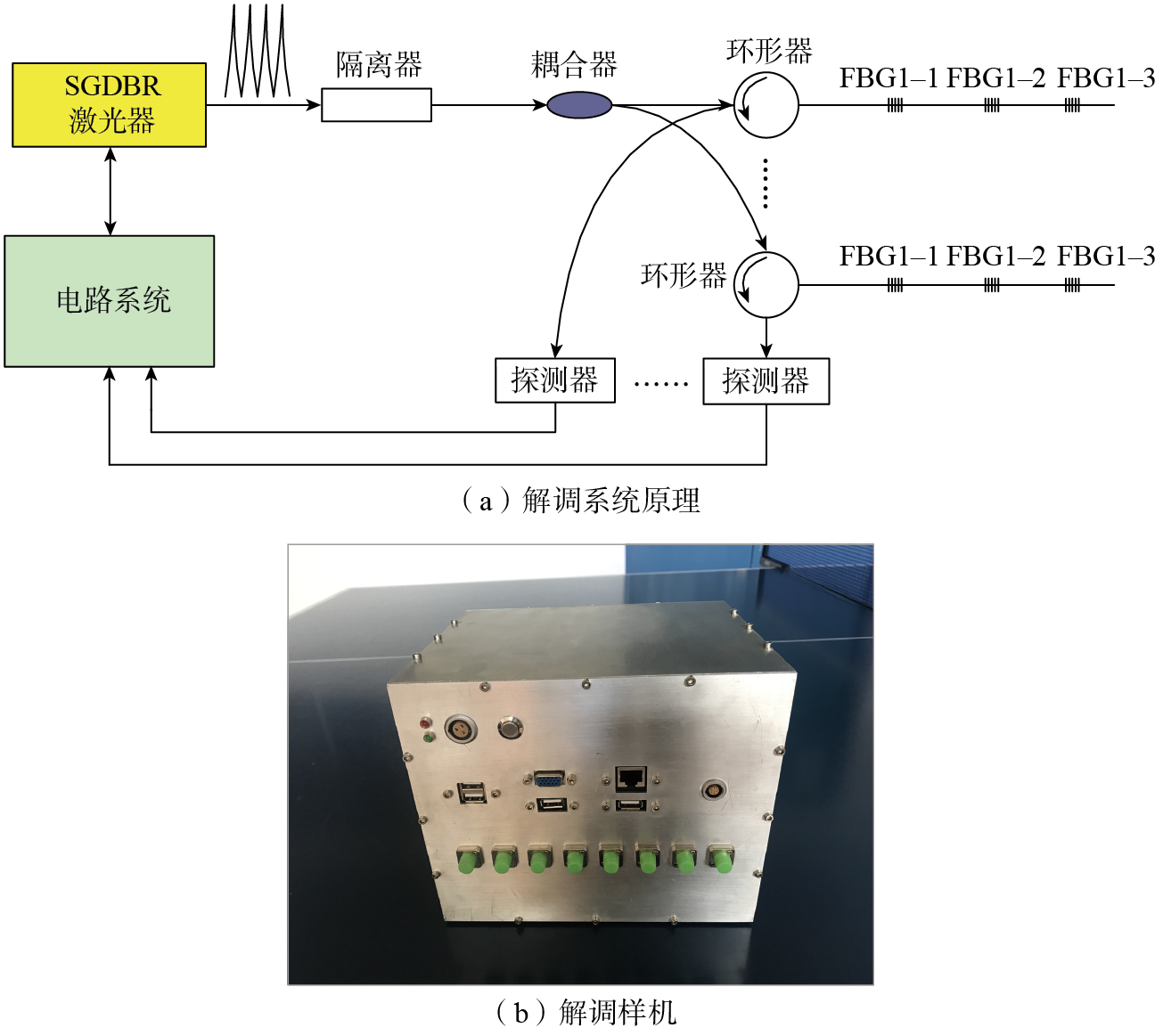
采用基于SGDBR激光器解调系统实时获取光纤光栅传感器的中心波长,解调系统原理及自研解调样机如图6所示,电路系统控制SGDBR连续输出指定波长的窄带脉冲光信号,光信号经过耦合器进行分路,可以同时对多通道光纤光栅传感器进行测试,每个通道的光信号经过环形器后返回到光电探测器,电路系统对光电转换后的信号进行解调处理,最终得到被测光纤光栅传感器的中心波长值。
为获取光纤变形传感器测得应变与偏度的对应关系,基于应变测试数据进行分段二次拟合,具体过程如下。
(1)偏度计算方法。
后缘的变形角度可由激光跟踪仪获得的坐标数据得到。在后缘变形过程中,激光跟踪仪能获取后缘端点和上、下蒙皮起始点的实际坐标,将上、下蒙皮起始点连线中点作为转轴,以初始位置后缘端点与转轴的连线作为基准线,在后缘变形到不同角度时,后缘端点和转轴的连线与基准线夹角即为后缘的偏度,以向下偏转为正方向。如图7所示,转轴点I坐标为(x0,y0);后缘端点初始坐标J为(x1,y1);后缘端点变形后坐标K为(x2,y2)。由于所研究的后缘驱动机构的自由度为1,可以建立单一测点应变与后缘偏度的映射关系。
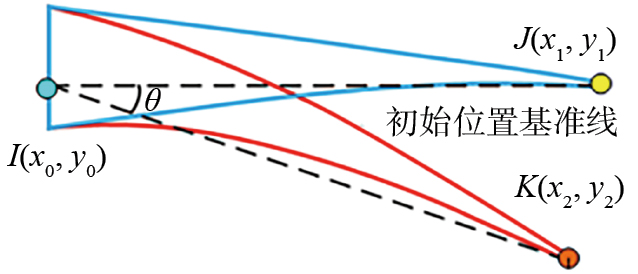
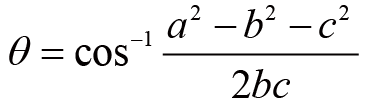
根据三角形余弦定理,将图7中点I与点J的距离、点I与点K以及J与K的距离分别记为a、b和c可由式(3)计算得到偏度θ。
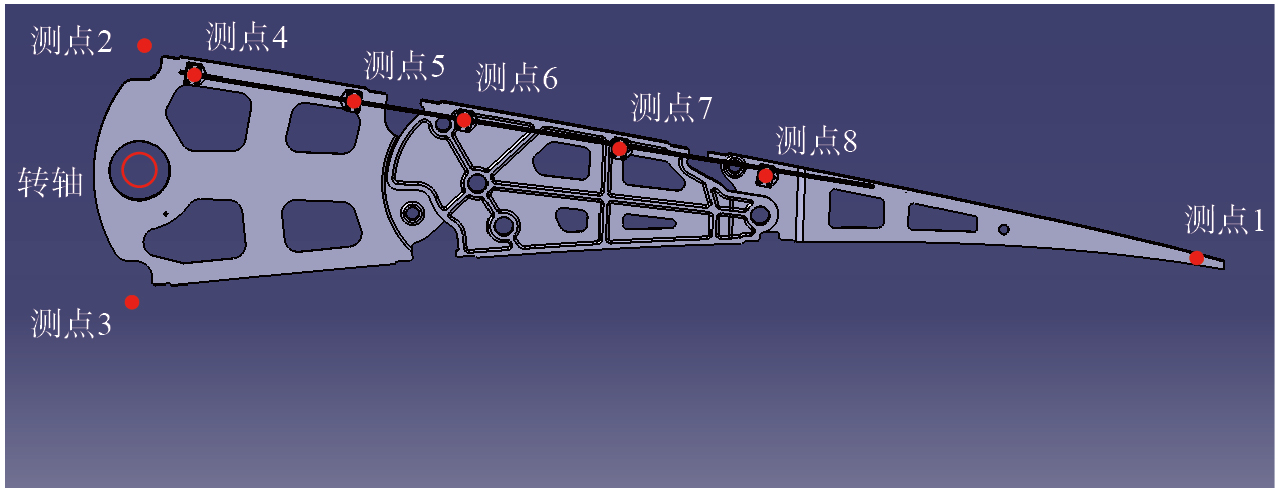
激光跟踪仪测点位置如图8所示,测点1位于后缘末端,转轴位置为测点2与3坐标中点,基于3个测点的坐标可以计算出后缘偏度。测点4~8为5个支撑件上的测点。
(2)分段二次拟合方法。
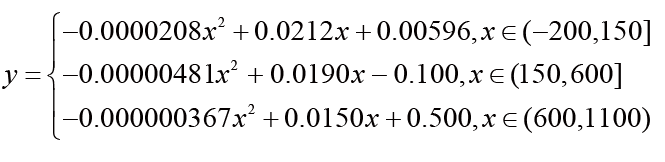
用于拟合的数据包括使用激光跟踪仪测得变弯度机翼后缘偏度精确数据和光纤梁上第7测量点的应变数据,具体数据如表1所示。应变与偏度关系难以通过单一参数的曲线进行精确拟合,根据偏度相对于应变的变化趋势,将表1中的测试数据分成3组,分别对应序号1~6、6~12和11~15。对各组数据进行拟合,获得3个分段拟合公式。将3条曲线相互分段连接获得最终拟合曲线。根据分组数据应变范围,可分为(-200,150],(150~600],(600~1100)3个应变区间,处理应变数据时根据应变数值所在区间选择对应的曲线公式得到实测角度。
| 序号 | 光纤应变数据EFBG/με | 激光跟踪仪测试偏度值θreal/(°) |
|---|---|---|
| 1 | -42.083 | -1.051 |
| 2 | -45 | -0.852 |
| 3 | 0 | 0 |
| 4 | 23.75 | 0.472 |
| 5 | 123.75 | 2.362 |
| 6 | 166.25 | 2.924 |
| 7 | 234.167 | 3.957 |
| 8 | 291.25 | 5.149 |
| 9 | 401.25 | 6.296 |
| 10 | 391.667 | 7.079 |
| 11 | 636.25 | 9.837 |
| 12 | 686.667 | 10.822 |
| 13 | 777.917 | 11.868 |
| 14 | 847.5 | 13.015 |
| 15 | 1012.083 | 15.353 |
以应变值作为自变量x;实测角度值为因变量y,采用二次多项式拟合的方式得到理论曲线。二次多项式的基本形式为

在各应变范围内分别确定3个系数a,b,c即可确定3个曲线方程,即为应变-偏度转换方程。
(3)偏差分析方法。
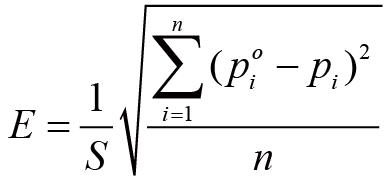
均方根误差(Root mean squared error,RMSE)是一种衡量模型预测值与真实值之间差异的常用方法,反映了观测值与真实值之间的偏差程度。采用均方根相对偏差的计算方法对光纤变形传感器测量偏差进行分析,由于偏度的区间包含0°,相对偏差的分母不能为0,且当分母取值在0附近时存在绝对偏差很小但相对偏差显著变大的情况,无法合理反映出真实偏差程度,因此参考仪表引用误差的计算方式,将分母统一改为偏度测量的满量程值,具体计算方法如下。
设激光跟踪仪获取的偏度值为pi;光纤变形传感器测得的偏度值为
用该方法对后缘根据激光跟踪仪坐标数据计算得到的偏度与光纤变形传感器实测偏度数据进行均方根相对偏差计算,结果如表2所示。其中,θreal为激光跟踪仪测试偏度值;θFBG为光纤变形传感器实测应变计算得到的变形偏度值(光纤变形偏转角度)。
| 序号 | 激光跟踪仪测试偏度值θreal/(°) | 光纤变形偏转角度θFBG/(°) |
|---|---|---|
| 1 | -0.852 | -0.990 |
| 2 | 0.000 | 0.006 |
| 3 | 2.362 | 2.310 |
| 4 | 3.957 | 4.081 |
| 5 | 6.296 | 6.743 |
| 6 | 9.837 | 9.923 |
| 7 | 11.868 | 11.980 |
| 8 | 15.353 | 15.349 |
| 9 | 13.015 | 12.986 |
| 10 | 10.822 | 10.657 |
| 11 | 7.079 | 6.597 |
| 12 | 5.149 | 5.021 |
| 13 | 2.924 | 2.923 |
| 14 | 0.472 | 0.498 |
| 15 | -1.051 | -0.923 |
由于后缘的主体结构可视为具有一个3R串联机器人,至少需要获取3个变量才能确定其运动状态。由于本研究中驱动指节式变弯度后缘产生变形的是一种平面六杆机构,其机构自由度为1,采用一个电机即可驱动3段直接转动来拟合气动外形,在同一工况下,任意偏度对应的结构状态唯一。理论上在获得偏度后可通过机构运动学模型求出各关节转角,但在实际条件下由于传动机构连接关系复杂,在加工误差、装配误差等因素的影响下,运动学模型不能准确反映结构的真实气动外形。在通过光纤变形传感器获取后缘偏度的基础上,本文提出一种基于关键点坐标的后缘关节角度求解方法,以下偏角度、后缘关键点坐标数据和结构尺寸数据作为输入,计算出后缘3个关节的转动角度,进而实现后缘的结构变形重构。
首先,将光纤梁的5个支撑件作为形状重构的关键点,每个支撑件对应的都是空间坐标,由于预设条件为后缘不偏转,属于二维变形,每个支撑件仅有x、y的坐标值,z为利用激光跟踪仪测量的后缘偏度,对其[0°,12.6°]区间中7个偏度下的5支撑件坐标3次样条插值,如图9所示。
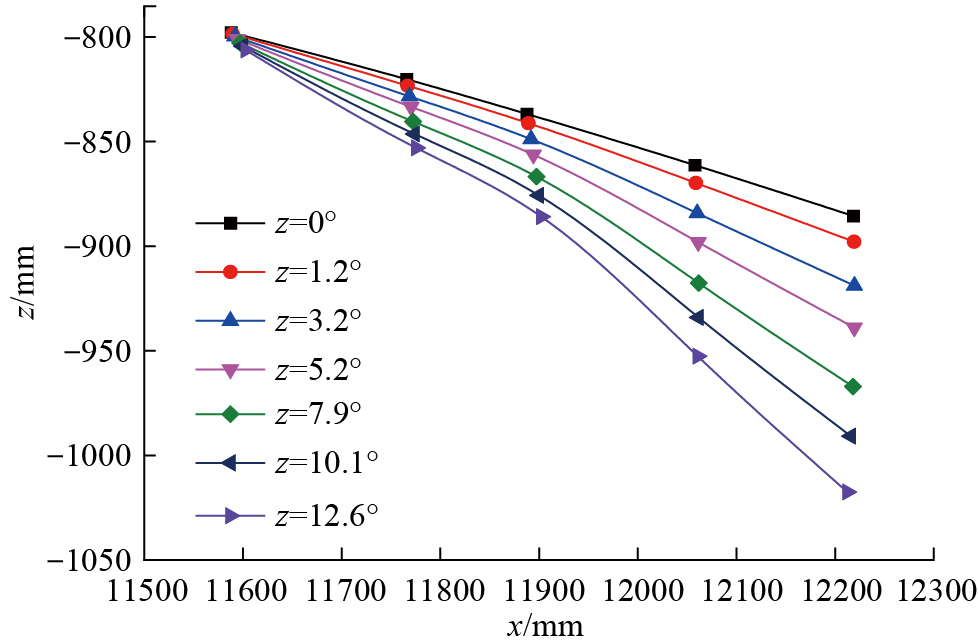
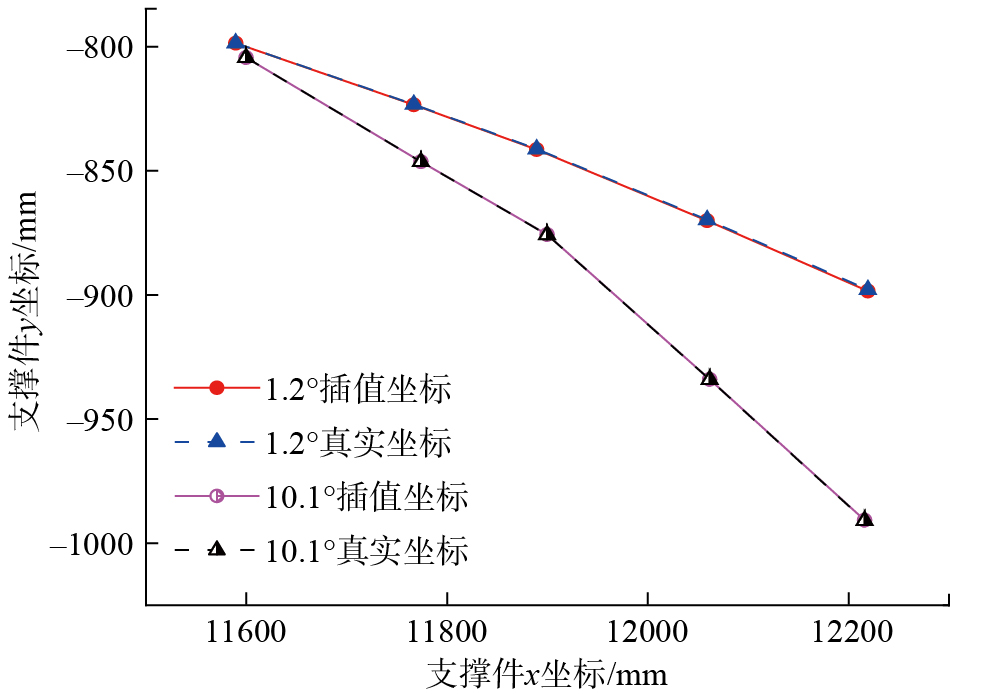
可以看出,各支撑件的运动轨迹较为规律,通过对某一支撑件在不同偏度下的位置坐标进行插值,可以估算出任意偏度下该支撑件的坐标。为验证插值的准确性,提取偏度取值为0,3.2,5.2,7.9,12.6时各支撑件坐标进行3次样条插值,利用偏度取值为1.2和10.1时支撑件的真实坐标数据进行验证。将真实坐标数据和插值得到的坐标数据进行对比,如图10所示,可知插值精度较高。根据所得的3次样条函数,针对给定的下偏角度值,可以计算出该偏度下各个关键点坐标。
在已知5个关键点初始坐标和当前坐标的条件下,结合后缘翼肋的结构尺寸信息可计算出各个关节当前的转动角度。图11为机翼后缘翼肋主体结构初始状态下各支撑件与各关节相对位置的示意图,其中O1、O2、O3分别为关节1~3的中心,A、B、C、D、E分别为支撑件1~5的坐标点。
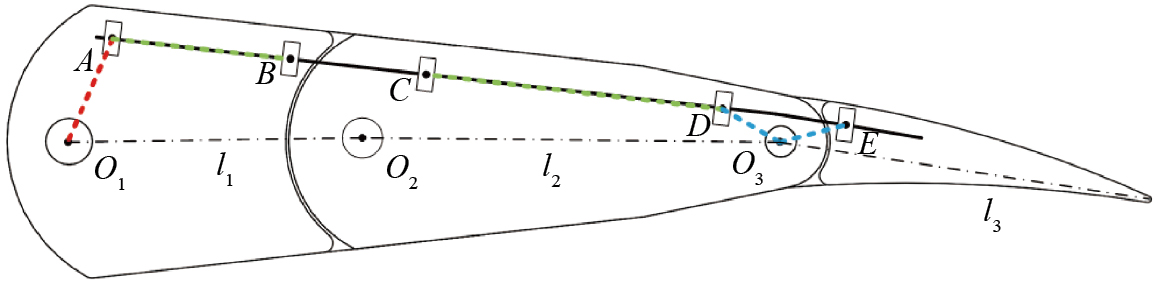
基于图11中的相对位置,以下为各关节转角的计算方法。
(1)关节1转角。
由于后缘偏转过程中支撑件1仅围绕关节1转动,因此计算向量O1A的旋转角度即可计算出关节1的旋转角度θ1。
(2)关节2转角。
关节2的转角可用向量AB与向量CD的夹角变化量计算得出。由于A、B、C、D这4点的初始坐标和当前坐标已知,分别计算初始位置下AB与CD的夹角
(3)关节3转角。
由于仅凭支撑件5的坐标无法计算末段连杆绕关节3的转角,采用
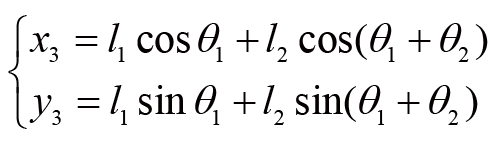
式中,l1和l2为O1O2和O2O3的长度,属于已知结构尺寸参数。
| 连杆 | li-1 | αi-1 | di | θi |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | θ1 |
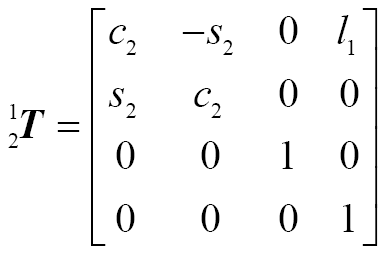
| 2 | l1 | 0 | 0 | θ2 |
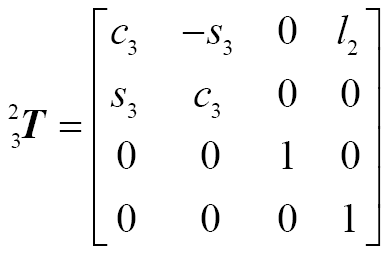
| 3 | l2 | 0 | 0 | θ3 |
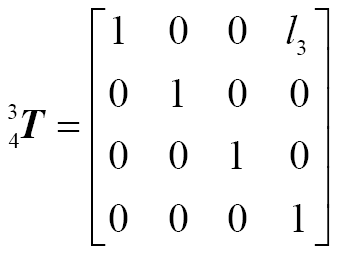
| 4 | l3 | 0 | 0 | 0 |
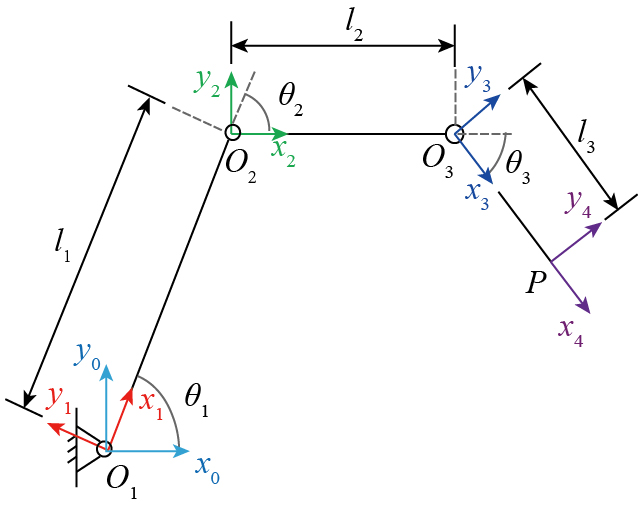
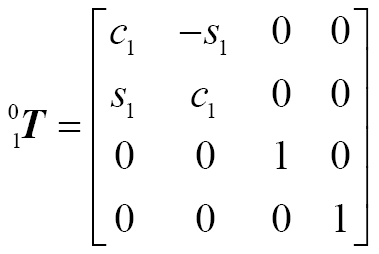
关节1处的坐标系{0}与坐标系{1}之间的变换矩阵为式(8),约定si=sinθi;ci=cosθi;sij =sin(θi+θj);cij =cos(θi+θj),sijk和cijk同理。
同理,坐标系{1}~{4}中相邻坐标系的变换矩阵如下。
将式(8)~(11)代入
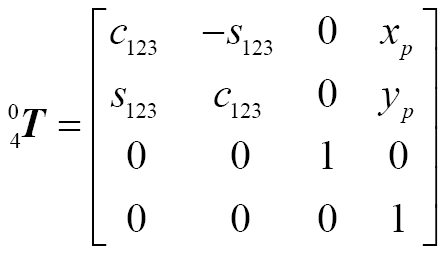
式中,xp与yp为后缘末端P点相对坐标系{0}的坐标,可表示为
通过上式,可由2.2节中得到的关节转角计算出后缘末端当前坐标以及当前后缘偏度。
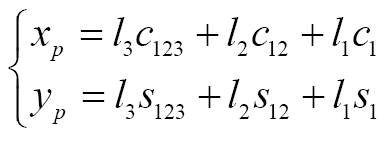
变弯度后缘变形测试系统由机翼后缘(双翼肋后缘实物)、光纤变形传感器、传输光缆、光纤变形采集模块、激光跟踪仪等组成,机翼后缘偏转测试系统及光纤变形传感器如图13所示。变形传感器通过5个支撑结构支撑光纤梁,当后缘结构弯曲时,带动光纤梁发生变形。在后缘表面和侧面布置激光跟踪仪测点,采用的激光跟踪仪型号leica AT960,精度U=±35 μm。基于后缘偏转测试采集的不同状态下结构外形坐标和关键点坐标,开展形状重构算法的研究。在测试过程中,后缘的结构变形是由伺服电机驱动产生的,根据光纤传感器实测应变计算得到的偏度值反馈,在控制后缘偏度达到目标值后,记录激光跟踪仪测点坐标数据并进行对比分析。
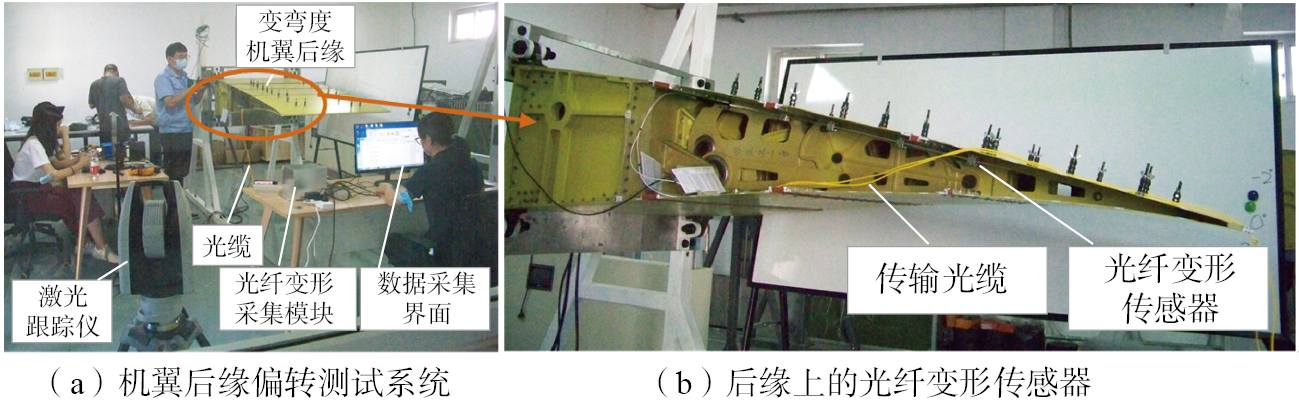
后缘形状重构算法试验验证流程如图14所示。在搭建的变弯度机翼后缘变形试验中,通过光纤变形传感器测量应变数据,通过预先激光跟踪仪测试数据和光纤变形传感器应变数据得到应变-偏度转换方程,计算得到试验中的后缘偏度,结合前文中激光跟踪仪得到的3次样条插值结果,可以计算出关键点坐标。进而结合后缘结构的尺寸数据,逆向求解得到后缘翼肋3个关节的旋转角度,实现后缘变形的重构。基于关节角度正向求解出后缘的偏度,与激光跟踪仪实测的机翼后缘形状所得的偏度进行测量误差对比分析。
为验证本文提出的形状重构算法的有效性和准确性,基于全尺寸机翼后缘偏转变形测试试验数据,开展形状重构算法的验证。
基于光纤变形传感器实测的应变数据,利用分段拟合方法测得的后缘偏度值作为关键点坐标计算的输入数据。选取实测偏度在(-1°,15.4°)范围内的8个偏度数据进行形状重构,结果对比如表4所示,θREC为关键点重构偏度,偏度值以下偏为正;θR1,θR2和θR3分别为关节1~3的重构角度。
| 序号 | 激光测试实测偏转角度θreal/(°) | 光纤变形重构偏转角度θFBG/(°) | 关键点重构偏度θREC/(°) | 关节1重构角度θR1/(°) | 关节2重构角度θR2/(°) | 关节3重构角度θR3/(°) |
|---|---|---|---|---|---|---|
| 1 | -0.852 | -0.990 | -1.046 | 0.675 | 0.562 | 0.135 |
| 2 | 0 | 0.006 | 0.006 | -0.004 | -0.003 | -0.001 |
| 3 | 2.362 | 2.310 | 2.345 | -1.462 | -1.214 | -0.500 |
| 4 | 3.957 | 4.081 | 4.075 | -2.531 | -2.099 | -0.908 |
| 5 | 6.296 | 6.743 | 6.722 | -4.167 | -3.457 | -1.526 |
| 6 | 9.837 | 9.923 | 10.064 | -6.196 | -5.170 | -2.395 |
| 7 | 11.868 | 11.980 | 12.263 | -7.509 | -6.317 | -2.984 |
| 8 | 15.353 | 15.349 | 15.711 | -9.581 | -8.239 | -3.677 |
计算关键点重构偏度与激光跟踪仪测得偏度的均方根相对偏差为1.57%,具有较高的重构精度。
本文提出了一种基于光纤光栅传感器的变弯度机翼后缘形状重构方法,通过设计光纤梁和支撑结构,开展预先试验获取应变-偏度-关键点坐标转换方程,结合简化的三关节运动学模型实现了对柔性大变形机翼后缘形状的高精度实时感知与重构。本文设计的光纤变形传感器,可跟随结构变形而变形,安装及拆卸便捷,可重复使用;经重构算法与激光跟踪仪所测结果对比,后缘偏度的相对误差为1.57%,证明该方法充分利用了机翼结构特征和地面变形测试数据,重构结果与真实变形高度一致,为柔性大变形机翼的实时形状感知提供一种可行的思路和手段。
 | 王文娟 高级工程师,研究方向为功能结构、结构健康监测等。 |
参考文献
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |
| [16] | |
| [17] | |
| [18] | |