带有位移约束的可变形波纹柔性后缘设计
中图分类号:
V224
文献标识码:
A
流转信息 | 收稿日期 : 2025-11-14 退修日期 : 2025-12-12 录用日期 : 2025-12-21 |
引用格式
引文格式:尹维龙, 黄欣, 张佳森, 等. 带有位移约束的可变形波纹柔性后缘设计[J]. 航空制造技术, 2026, 69(5): 25010168.
摘要
变体飞行器翼面在变形过程中保持光滑、连续和无缝是结构设计的难题。本文设计了一种带有位移约束的波纹结构柔性变形骨架,有效解决了传统柔性蒙皮在受压过程中易产生褶皱的问题。首先,针对常规波纹结构在变形过程中存在的弯曲-压缩耦合特性,设计了一种新型波纹结构,通过在关键位置引入位移约束,有效抑制了弯曲过程中引起的压缩变形。然后,将其简化为梁单元模型,基于链式算法建立了考虑位移约束条件下的大变形计算方法,分析了该结构在柔性蒙皮约束和均布载荷作用下的力学响应。最后,制作了基于波纹结构的变形后缘样机并开展试验验证。结果表明,该后缘结构可实现±20°的柔性变形,变形过程中翼面保持良好的光滑性和连续性,柔性蒙皮未出现鼓包现象。该成果为柔性后缘结构的设计与优化提供了新的理论依据与工程途径。
关键词
变体飞行器;柔性后缘;波纹结构;链式算法;几何非线性;
Design of Morphing Trailing Edge Based on Corrugated Structure With Displacement Constraints
Citations
YIN Weilong, HUANG Xin, ZHANG Jiasen, et al. Design of morphing trailing edge based on corrugated structure with displacement constraints[J]. Aeronautical Manufacturing Technology, 2026, 69(5): 25010168.
Abstract
In morphing aircraft, achieving smoothness, continuity, and seamless connection of wing surfaces during deformation remains a major challenge in structural design. To address the issue of wrinkling that frequently occurs in conventional flexible skins under compression, this paper proposes a corrugated flexible morphing framework with displacement constraints. Firstly, considering the bending-compression coupling inherent in traditional corrugated structures, a novel corrugated configuration is designed by introducing displacement constraints at critical locations, which effectively suppresses compression-induced deformation during bending. Taking into account the anisotropic characteristics of the structure, it is simplified into a beam-element model, and a chain-based algorithm is developed to establish a large-deformation computational method under displacement constraints. The mechanical responses of the structure under flexible skin constraints and uniformly distributed loads are further analyzed. Finally, a prototype of a morphing trailing edge based on the proposed corrugated structure is fabricated and experimentally validated. The results demonstrate that the trailing-edge structure achieves large deformation of up to ±20°, while maintaining good surface smoothness and continuity throughout the morphing process, with no local buckling observed in the flexible skin. This design provides a new theoretical basis and engineering pathway for the design and optimization of flexible trailing-edge structures.
Keywords
Morphing aircraft
随着航空航天技术的不断发展,传统固定翼飞行器因其机翼构型固定,难以在整个飞行包线内实现气动性能的最优匹配。特别是在复杂飞行环境和多任务需求下,这一特点暴露出其在适应性和效率上的局限性[
NEGAHBAN M H, BASHIR M, TRAISNEL V, et al. Seamless morphing trailing edge flaps for UAS-S45 using high-fidelity aerodynamic optimization[J]. Chinese Journal of Aeronautics, 2024, 37(2): 12-29.
李琦, 杨宇, 王志刚, 等. 柔性变形翼结构设计、建模与分析研究进展[J]. 航空科学技术, 2024, 35(6): 1-11.LI Qi, YANG Yu, WANG Zhigang, et al. Research progress on the design, modeling and analysis of flexible deformable wing structures[J]. Aeronautical Science & Technology, 2024, 35(6): 1-11.
1-3
4
5
6
7
现有研究主要集中在变形骨架、柔性蒙皮和驱动机构的协同设计,其中,变形骨架是研究核心,目前变形骨架方案可分为机械结构和柔性结构两类,且各类方案仍面临结构质量、复杂性、表面光滑性和承受外部载荷时的力学性能等方面的挑战。尽管机械结构方案具有较高的可靠性,并广泛应用于大型飞机设计中,但其质量大、复杂度高的缺点仍然限制了其在高性能飞行器中的应用[
8
9
10
基于上述背景,本文提出了一种带有位移约束的柔性波纹结构,该结构通过引入位移约束,有效抑制了柔性蒙皮在受压时产生的褶皱问题,从而提升了外形保持能力。与传统的机械结构和柔性结构相比,本文提出的新型波纹结构不仅显著减轻了质量,还通过链式算法为大变形工况提供了有效的计算方法,同时采用了波纹结构作为变形骨架,突破了传统设计中对刚性骨架的依赖,进一步提升了设计的灵活性和结构集成度。最后设计了展长400 mm的柔性后缘样机,变形角度可达到±20°且变形过程中翼面光滑且连续。
以波纹结构作为柔性后缘变形骨架,集成柔性蒙皮形成变形机翼翼面可以满足变弯度机翼对大变形的要求[
11
12
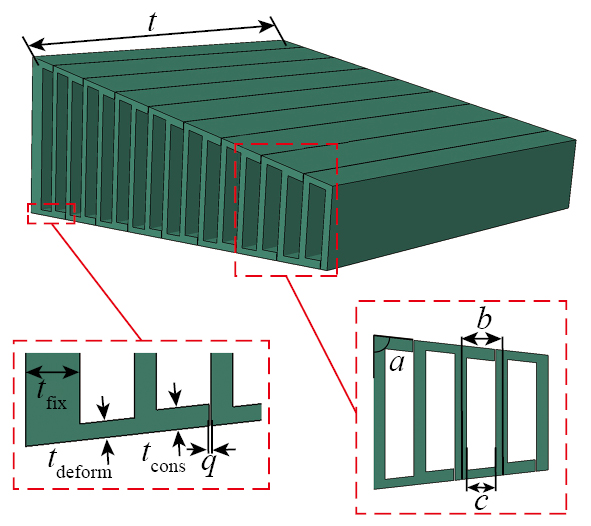
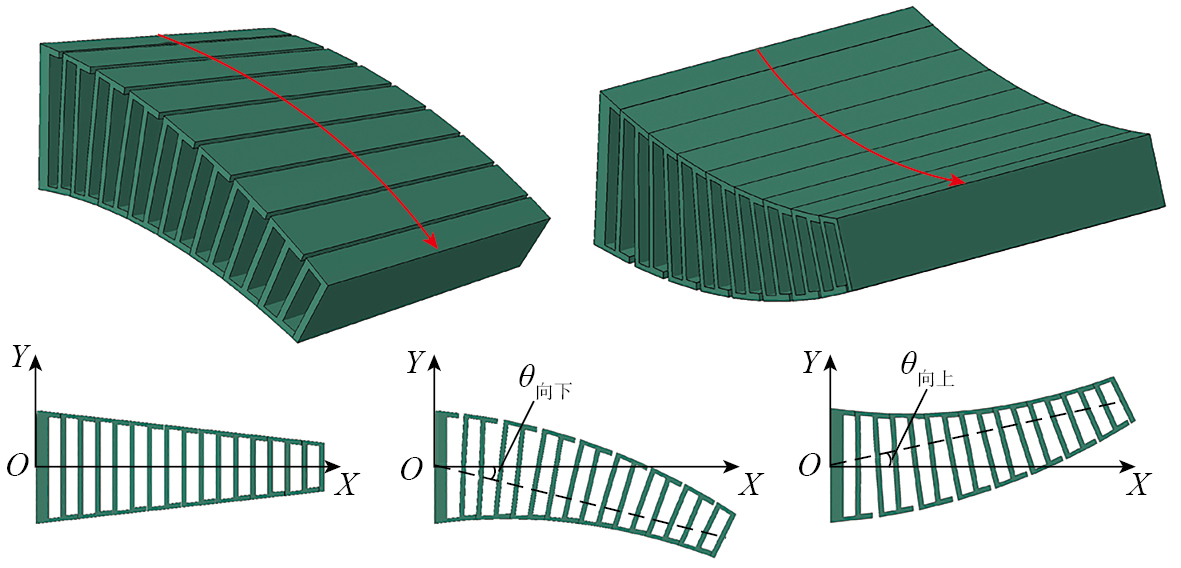
变形过程中一侧蒙皮产生褶皱的直接原因在于该侧蒙皮受到了压缩作用,因此,考虑在变形骨架中增加约束来避免柔性蒙皮受到压缩。所设计的新型波纹结构如图1所示,在相邻波纹之间增加了限位结构以对波纹结构变形骨架施加位移约束,使得变形骨架在变形过程中其一侧波纹间距增大拉伸蒙皮;另外一侧波纹间距保持不变,消除了该侧对柔性蒙皮的压缩作用,如图2所示。
波纹结构具有高度各向异性,即结构在垂直波纹方向刚度较大,在沿波纹方向刚度更小,因此,将结构简化为二维梁模型进行计算[
13
14
15
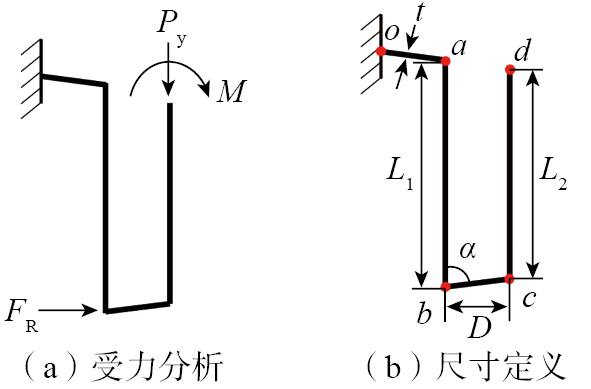
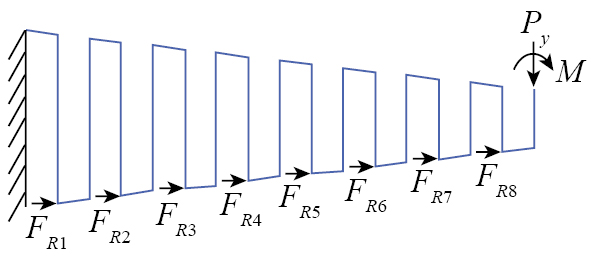
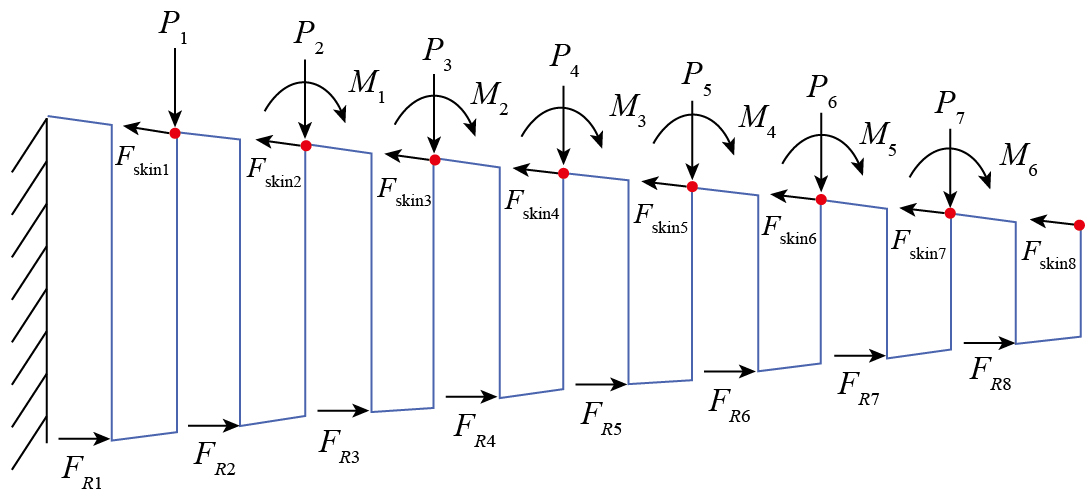
基于打靶法思想,将边界约束条件转化为初值问题,即被约束节点上的约束力,简化力学模型如图3所示。其中,FR为未知初值,其作用是约束被限制梁单元的位移。计算时,更新FR大小直至满足边界条件为止。
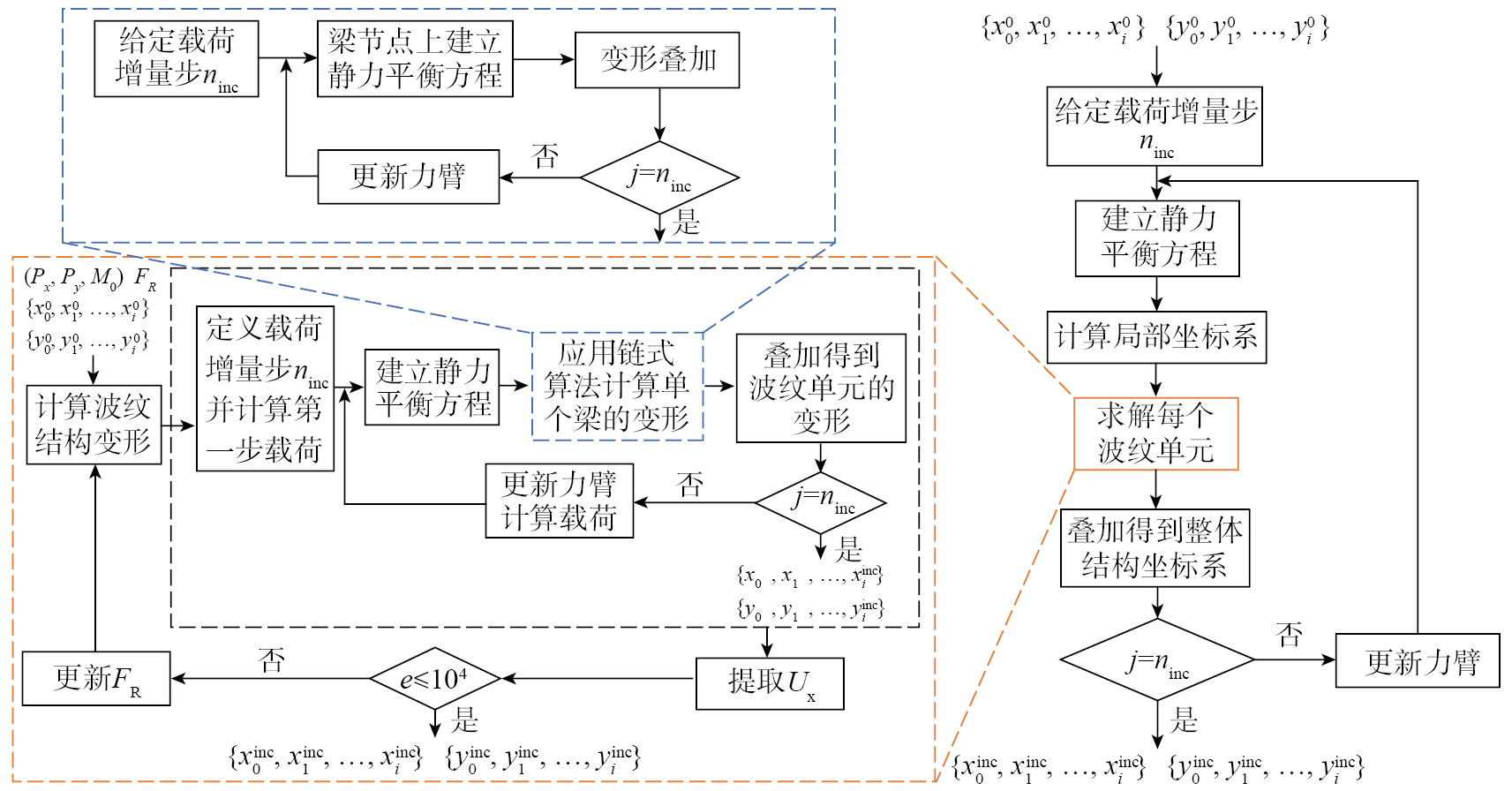
链式算法结合打靶法求解带有位移约束的波纹结果变形,需要给定结构初始位置坐标和载荷和约束力初值。波纹单元计算流程如图4所示,其计算步骤主要有以下几个方面。
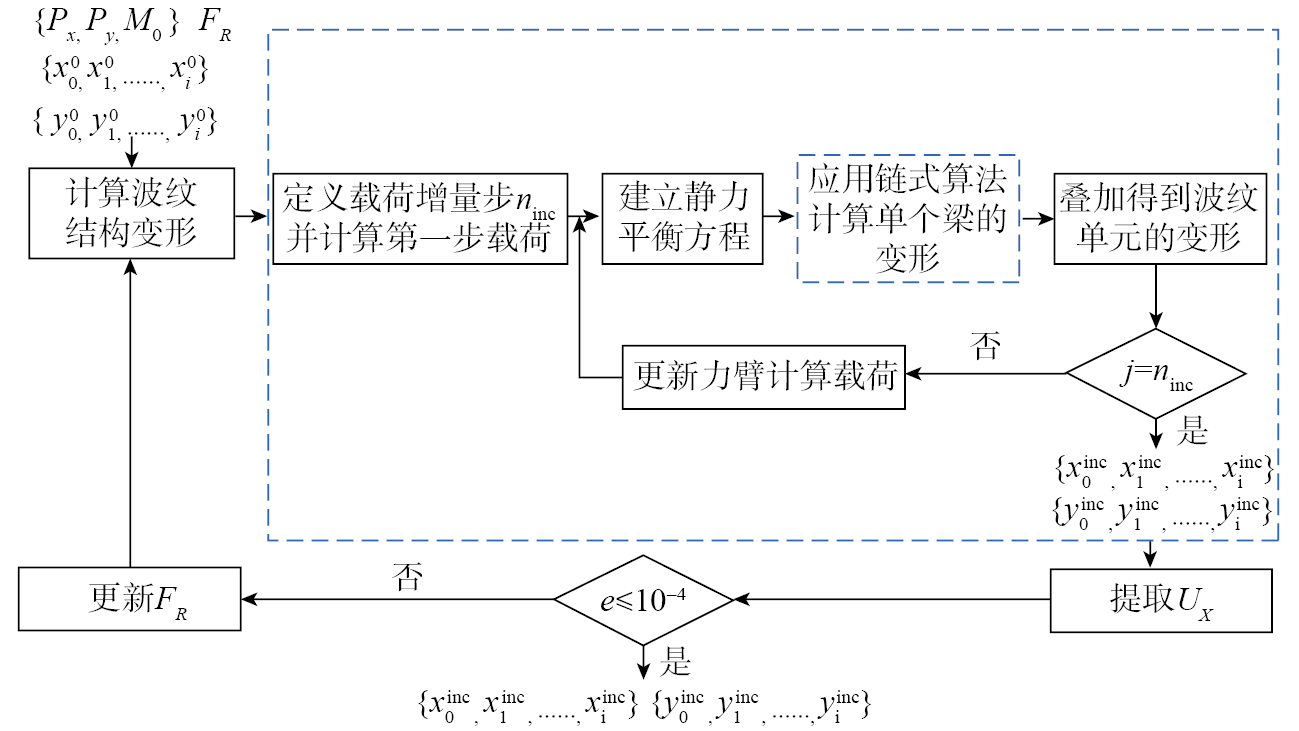
(1)生成结构初始位置坐标集合,即横坐标集合
(2)采用链式算法求解结构变形,得到当前的梁节点坐标集合
(3)提取被约束梁节点坐标,在约束节点施加约束反力FR,得到新的梁节点坐标集合。
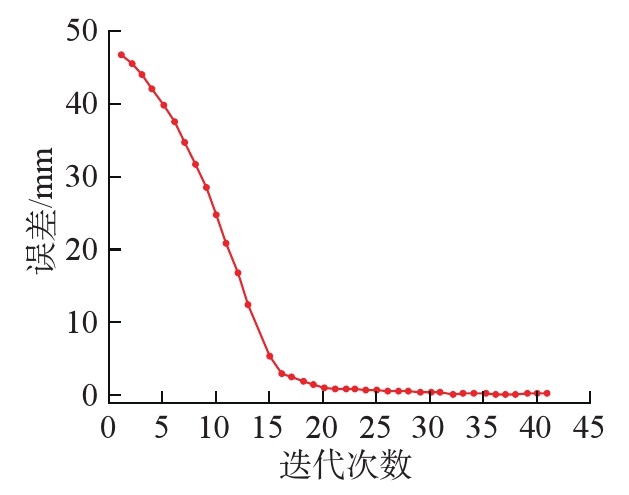
(4)计算误差e,若e≤10−4,则结果收敛,输出当前梁位置坐标集合,否则,更新FR直至结果收敛。其中误差e按照式(1)计算。
式中,
采用所设计的方法计算带有位移约束的波纹单元变形,竖直波纹壁长度分别为34.56 mm和33.18 mm,波纹间距以两竖直波纹壁中轴线间距定义,壁厚为1 mm,波纹间距为7 mm,竖直波纹壁和短波纹壁夹角根据变形段长度范围决定(本算例选定为84°),约束力初值为0.01 N。约束力更新策略为:施加载荷计算误差e,随着e的减小改变约束力的更新步长。当e较大时,约束力更新步长较大以提高计算速度;e减小时,约束力更新步长较小以避免跳过目标值。
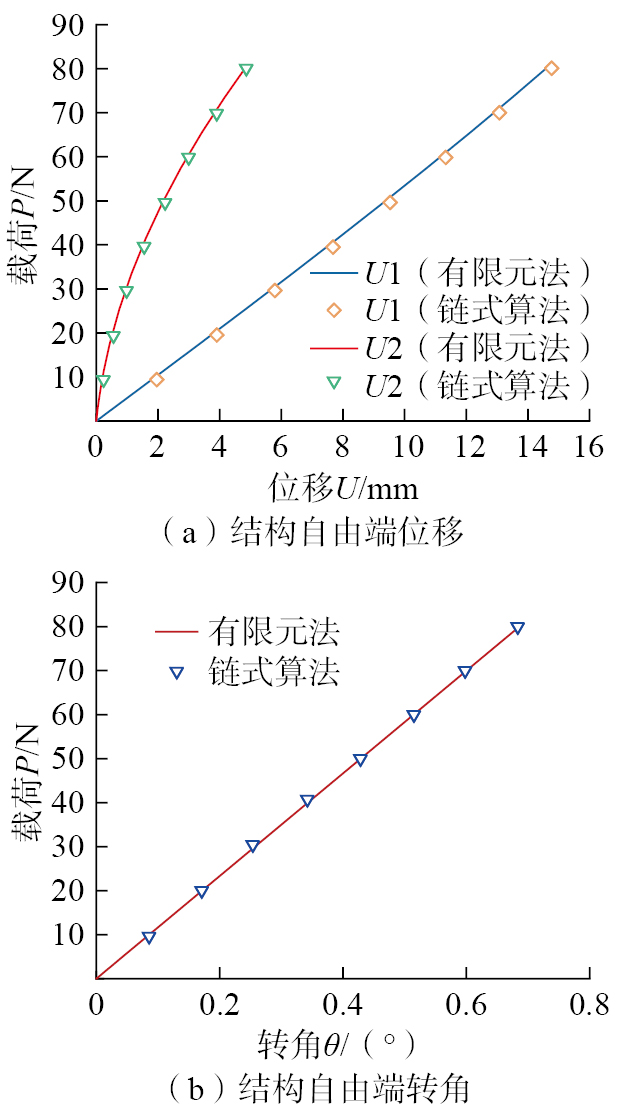
纯弯曲工况下,载荷增加至80 N·mm,计算得到结构自由端水平方向位移增加至14.65 mm,与有限元结果对比误差最大为0.2%;竖直方向位移增加至4.82 mm,与有限元结果对比误差最大为0.6%;自由端转角增加至0.68°,与有限元结果吻合良好。其中,误差主要来自于被约束节点的约束反力。链式算法通过迭代力臂来逼近非线性计算结果,纯弯曲载荷下不需要迭代力臂,因此,整体误差较小。因此,从工程设计角度出发,应尽可能采用弯曲驱动方式以降低误差,并利用位移约束限制压缩变形,从而提升柔性后缘结构的稳定性和计算可控性。对于剪切作用显著的工况,则结合有限元方法进行进一步验证。但约束反力引入了一个额外的载荷,该载荷主要作用于梁oa和梁ab,载荷的大小基于梁ab末端位移计算得到(图3)。纯弯曲载荷下,结构自由端转角和载荷之间维持良好的线性增长关系,而结构自由端竖直方向位移随着载荷增加呈现出变形增量减少的趋势,纯弯曲载荷-位移曲线如图7所示。纯弯曲载荷可以很好地代表一些典型的飞行载荷,如起飞或着陆时,机翼可能承受较大的弯曲载荷。对于巡航阶段,飞行器的机翼通常不会承受过大的弯曲载荷。根据飞行器的气动外形要求,机翼的后缘变形应在一定范围内保持平滑和连续。对于大多数实际应用,±20°的变形角度已足够应对多种飞行任务(如起飞、巡航等)。变形过程中,机翼表面保持光滑连续,并未出现鼓包等不稳定现象,表明该设计能够在变形过程中维持气动外形的要求。
对结构进行剪切弯曲载荷下的刚度分析,是在结构自由端施加水平方向载荷,使整体结构产生变形。所施加载荷逐步增加至2.1 N,计算得到的结构自由端水平方向位移增加至11.26 mm,本文计算方法与有限元计算结果误差最大为9.6%;结构自由端竖直方向位移为3.04 mm,与有限元计算结果误差最大为13.8%;在剪切弯曲载荷下,梁单元的剪切闭锁效应可能导致局部刚度不准确,尤其在短梁或高剪切效应的区域,该效应可能导致计算结果与实际结构的差距增大。为了减少这一效应,在有限元建模时选择合适的梁单元类型结构,在计算中,将剪切和弯曲载荷等效为集中力或分布力时,可能导致在实际工况下的误差,尤其在结构变形较大时。因此需进一步改进载荷等效模型,并考虑实际载荷分布(如气动载荷)对结构的影响。自由端转角为0.41°时,与有限元计算结果误差最大为7.9%。波纹单元变形量不超过30%时最大误差为1.54%,剪切弯曲载荷-位移曲线如图8所示。
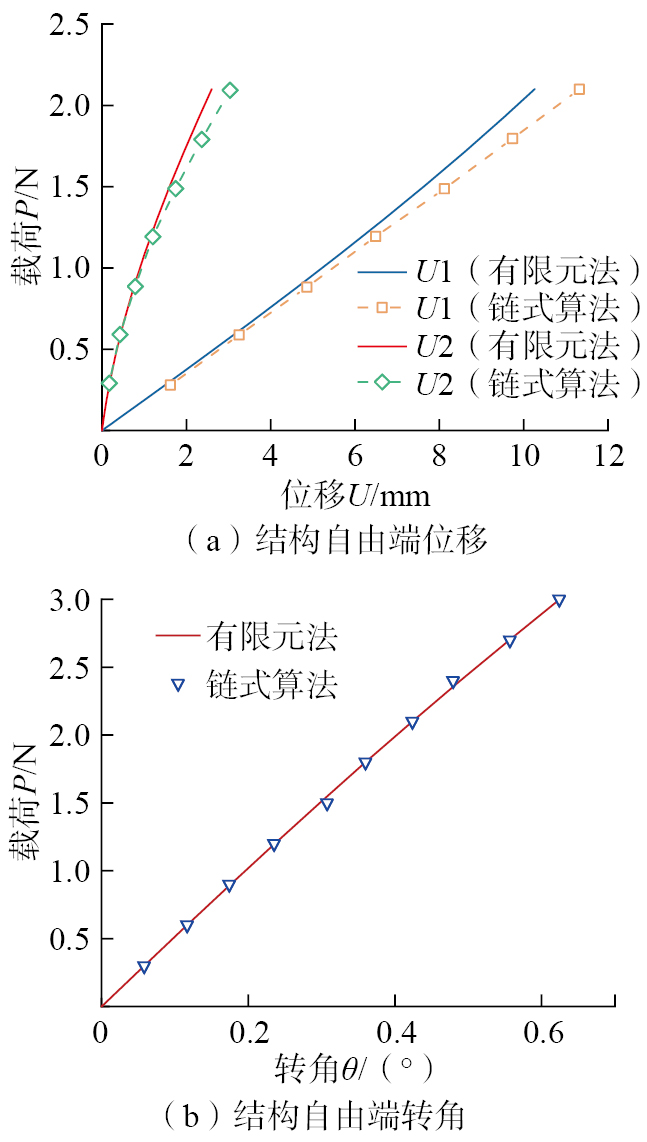
相比于纯弯曲载荷工况,剪切弯曲工况在计算过程中需要对每根梁多次迭代载荷力臂,造成了误差的积累,导致最终计算结果与有限元相比差距偏大。
基于链式算法思想计算带有位移约束波纹结构变形,带有位移约束的波纹结构力学模型如图9所示。首先给定载荷增量步,在每一个载荷增量步之内计算波纹单元的变形,计算流程参照本文1.2.2节。带有位移约束的波纹结构计算流程中,不同之处在于需要建立每一个波纹单元的局部坐标系。其具体流程为:在每个载荷增量步中,由前一个波纹单元的位移和转角计算下一个波纹单元的刚体位移和转动;提取被约束节点坐标施加边界条件,进而计算当前波纹单元变形。第一个波纹单元的局部坐标系和全局坐标系一致,每个波纹单元对于下一波纹单元的刚体位移贡献是在每一载荷增量步中计算完成的,目的是确保大变形求解过程中,力臂计算准确,波纹结构的计算流程如图10所示。
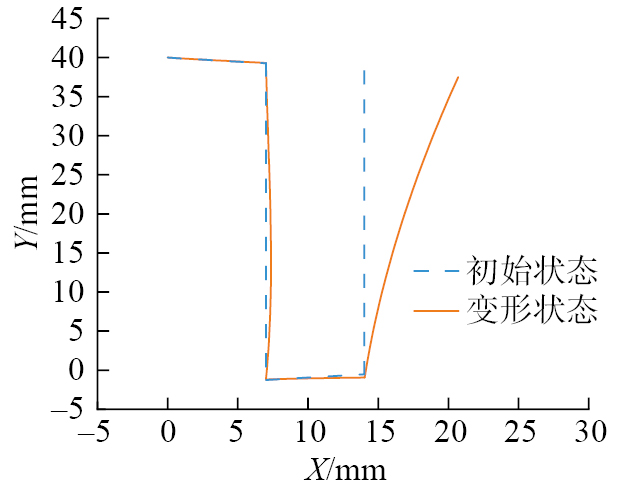
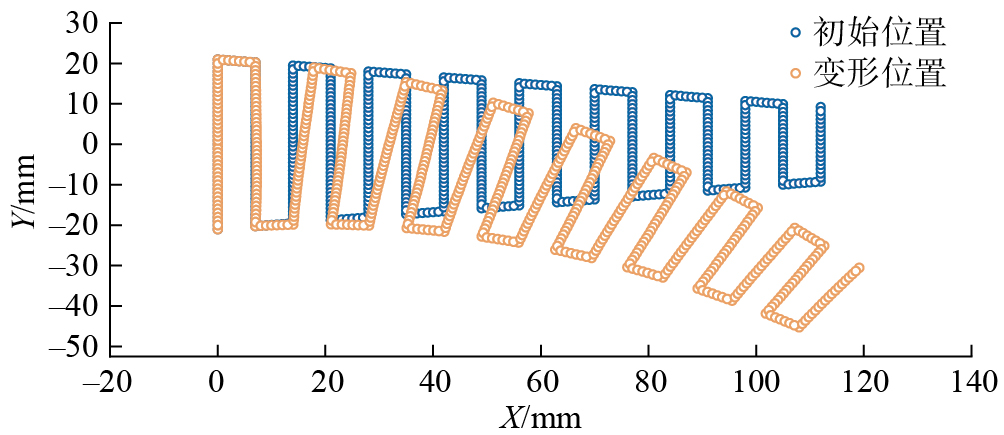
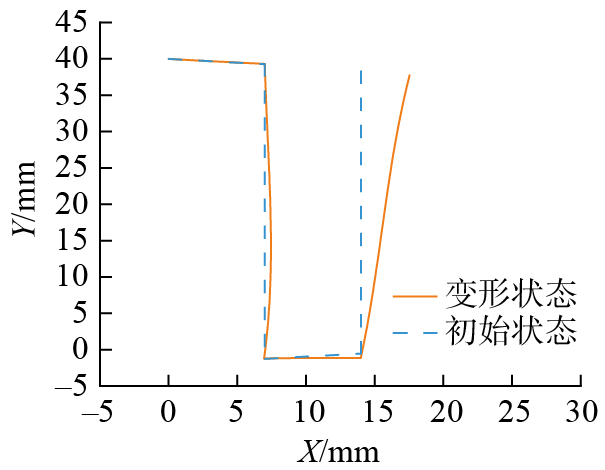
波纹间距为7 mm,波纹间距数量为8个,最大波纹高度为40.53 mm,最小波纹高度为18.48 mm,波纹结构变形段总长度112 mm,壁厚1 mm。结构一端边界条件为固定支撑,自由端施加载荷,变形结果如图11所示。
通过调控波纹间距、波纹数量等参数可以改变结构力学性能,采用上述方法多次计算,得到外载荷和结构变形角度之间的关系以评价结构刚度。结构变形角度定义方式为:固定端和自由端中点连线和初始中轴线夹角。
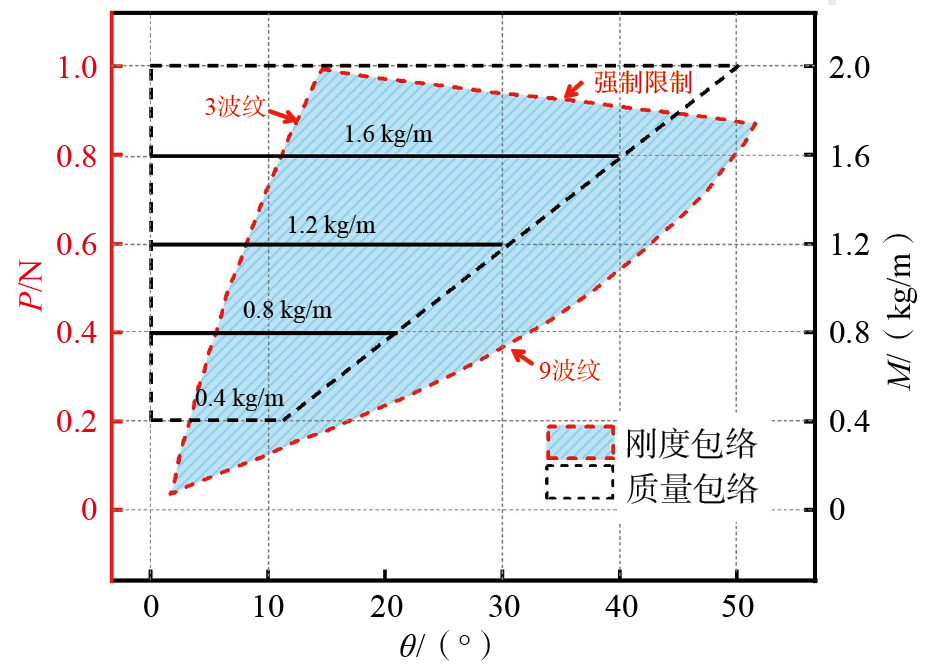
通过调整波纹数量和波纹间距可以获得不同结构形式的变形骨架,其刚度和质量均有不同。首先保持整个变形段总长度不变,通过调整波纹间距改变波纹数量,随着波纹间距的增大,波纹数量减少,每个波纹单元的波纹宽度和波纹高度之比增大,波纹单元刚度随之增大,使得整个结构刚度增大;其次保持波纹间距不变,通过调整波纹数量改变变形段总长度,随着波纹数量的增加,结构总长度增大,刚度减小,但是由于每次在结构末尾增加了一个波纹宽度和波纹刚度之比更小的单元,导致带来的变形性能收益逐渐降低。具体工程应用中,变形区域的设计空间往往有限,在一定设计空间内利用该新型波纹结构实现了机翼后缘柔性化,变形骨架的刚度也会存在与之对应的设计包络,因此通过调控波纹数量和波纹间距得到了上界为46 mm变形段总长的3波纹结构(即刚度最大)和下界为126 mm变形段总长的9波纹结构(刚度最小)的设计包络,通过形状参数调控获得满足不同力学性能需求的变形骨架方案。考虑到实际应用还需兼顾轻量化代价,本文进一步叠加给出质量约束信息,从图12中可以反映出不同单位长度、质量水平下的可行设计区域及其与目标区的对应关系。
波纹结构变形骨架作为内部支撑结构,需要外敷柔性蒙皮以维持气动外形。变形过程中,波纹间距增大,柔性蒙皮受到拉伸作用,同时变形骨架自身也会受到柔性蒙皮的反力。蒙皮约束反力的作用会使驱动能量提高,也会改变结构的变形形式,因此有必要进一步研究其影响。考虑到波纹结构自身的高度各向异性,可以将其简化为二维梁模型进行分析,柔性蒙皮为均匀的超弹性材料,将柔性蒙皮对变形骨架的约束反力简化为集中力作用在梁上,作用点在梁末端,方向与骨架的外轮廓重合。实际变形过程中波纹结构的间距会逐渐增大,柔性蒙皮被拉伸,其对变形骨架的约束反力也会逐渐增大,因此该约束反力Fskin为变量,其值大小与柔性蒙皮的刚度和波纹间距的增量有关。
根据波纹单元的边界条件得到其力学模型。根据结构的周期性选取波纹单元,依据链式算法将波纹单元一端固支,依据前文所述施加自由端载荷Py、M和被约束节点的约束反力FR。波纹结构变形为向下侧弯曲,在结构上侧施加蒙皮反力Fskin,作用点平移至梁节点。依据所建立的波纹单元力学模型,应用链式算法计算大变形结果,在每一次载荷增量法后更新蒙皮反力,施加蒙皮反力前后的约束反力对比如表1所示,计算结果如图13所示。
| Px/N | FR/N | |
|---|---|---|
| 未考虑蒙皮反力 | 考虑蒙皮反力 | |
| 0.3 | 0.086 | 0.065 |
| 0.6 | 0.172 | 0.166 |
| 0.9 | 0.256 | 0.257 |
| 1.2 | 0.339 | 0.336 |
| 1.5 | 0.421 | 0.414 |
| 1.8 | 0.502 | 0.492 |
| 2.1 | 0.581 | 0.571 |
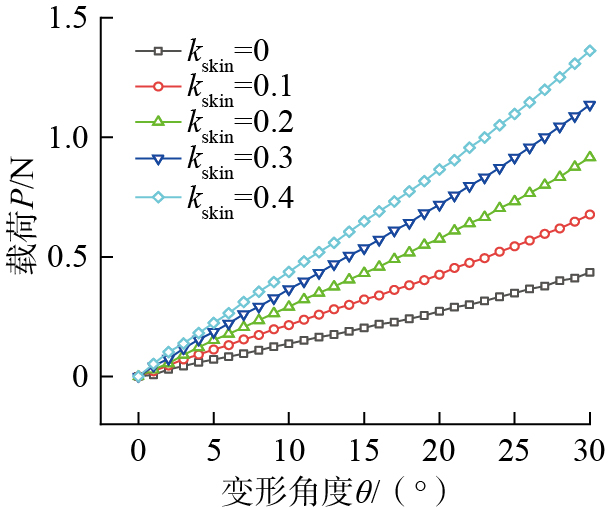
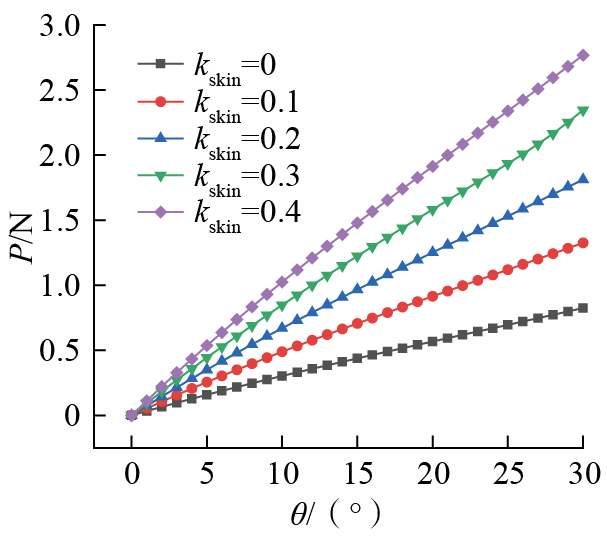
计算不同蒙皮刚度下结构变形和外载荷的关系,施加蒙皮约束虽然导致了波纹单元变形形式的改变,但是在变形未超过30°的范围内,结构弯曲变形的载荷-位移曲线基本符合线性关系,便于驱动方案的设计。同时,蒙皮刚度更大使得驱动能量需求更大,蒙皮的表面平整度更好,不同蒙皮刚度下载荷-变形角度关系如图14所示。
前文对不同结构参数带有位移约束的新型波纹结构进行了力学模型简化和刚度分析,其载荷形式大多为自由端施加横向集中载荷,在具体工程应用中,这与驱动的加载方式类似。同时需要考虑到该结构应用于机翼后缘时需要承受气动载荷,因此,有必要研究结构在均布载荷下的变形。依据波纹结构特性,同样将结构简化为二维梁模型进行计算,位移约束和蒙皮反力简化为约束反力。
在前文的计算流程中,外载荷施加在自由端的梁节点上,计算过程中依据链式算法计算可将规则简化至各个梁单元的末端节点上求解。因此,考虑分两步将均布载荷施加在各个梁单元节点,首先将均布载荷简化至每一个波纹单元上侧一梁节点,简化为一个集中力和一个力矩;其次再依据链式算法计算规则,将波纹单元划分为梁单元,将集中力和力矩简化至每一个梁单元自由端节点计算变形,迭代载荷力臂;最后叠加得到结构变形,其力学模型简化为图15所示。均布载荷简化为作用在节点上的力和弯矩,将结构从左至右分为等间距的8个部分,其中第一、二部分的均布载荷向中间简化,其余部分载荷向左简化。
采用与前文相同的算例,结构总长度为112 mm,波纹间距为7 mm,壁厚为1 mm。基于链式算法计算原理求解结构变形,首先将均布载荷简化至集中力和力矩,集中力作用至梁单元节点;其次依据链式算法计算原理将波纹结构拆分为多个波纹单元,每个波纹单元处理为悬臂波纹结构。采用载荷增量法,在每个载荷增量步下计算悬臂波纹结构变形,叠加得到整体结构变形,迭代力臂直至结果收敛。
在具体工程应用中,真实的气动载荷往往不是均匀分布的,难以用具体的方程给出气动载荷的形式,而基于链式算法的结构大变形计算方法可以将任意分布的气动载荷等效至结构上,均布载荷下载荷-变形角度关系如图16所示。
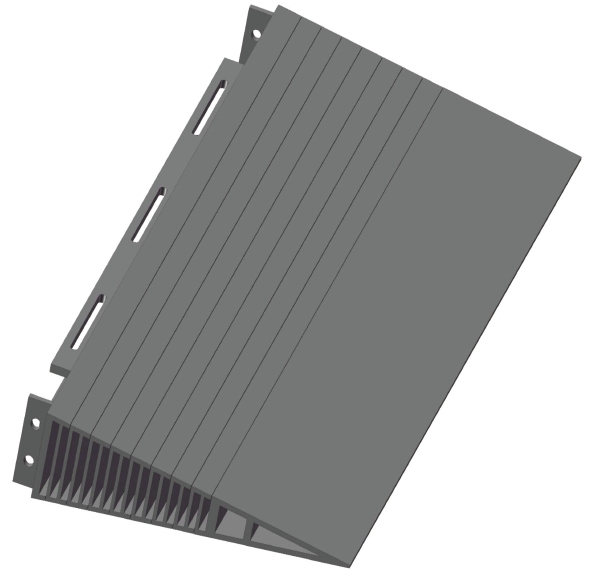
为保证结构变形之后的气动外形,选定波纹数目为8个,波纹壁厚为1.5 mm,波纹间距为7 mm,建立展长为400 mm的波纹结构变形骨架验证模型如图17所示。拟采用3D打印工艺制备波纹结构变形骨架验证模型,材料为PA12尼龙,弹性模量为1.5 GPa,泊松比为0.3,考虑到制备结构制备限制,限位结构和波纹之间留有0.2 mm的空隙,以避免打印过程中结构产生黏结,同时为保证结构尾缘处的局部刚度,在尾缘处的内部空间增加支撑,固定端处留有接口用于连接。
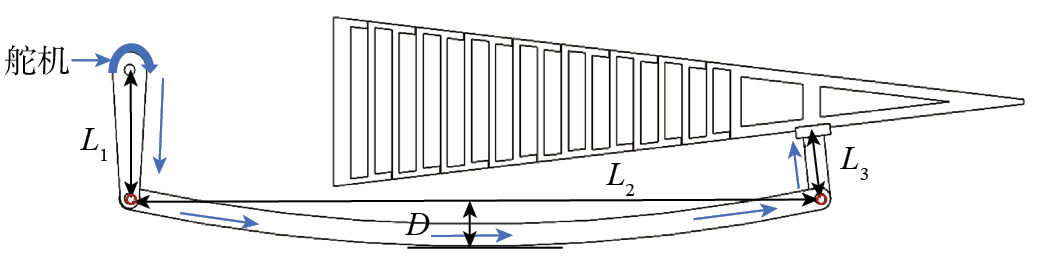
柔性后缘的驱动机构如图18所示,按照图示顺序从左至右依次命名为连杆1、2和3(L1,L2,L3)。L1和舵机连接,接受旋转运动输入。L1和L2铰接,在实际应用中,驱动机构的承载能力是关键问题,尤其是在某些锁死状态下,可能会产生较大的反向载荷。根据本文提出的柔性后缘设计,驱动机构主要通过连杆系统将旋转运动输入到波纹结构中。在某些飞行工况下,特别是在变形过程中的静态锁死状态或急速变形时,驱动机构可能会遭遇较大的载荷。对L2几何构型进行设计,以避免运动过程中的干涉。L3一端同L2铰接,一端同变形骨架连接且与变形骨架连接面保持垂直,以避免传力过程中变形骨架发生轴向拉伸变形。
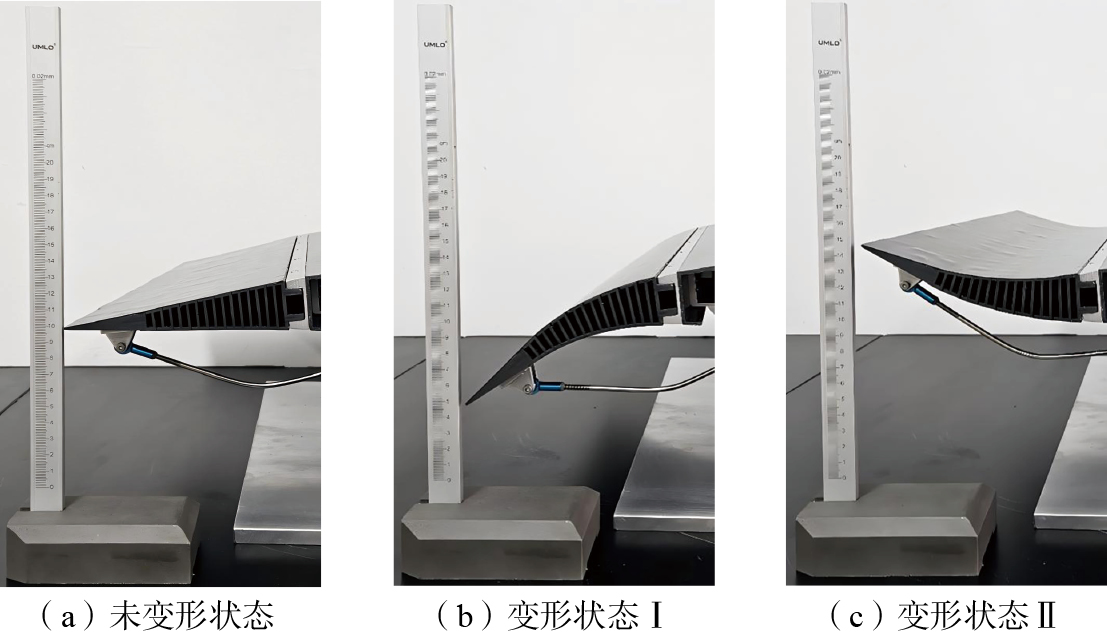
通过夹具将变形骨架夹紧固定,此时预留出的间隙消除,进而利用硅橡胶黏接剂集成柔性蒙皮。柔性后缘的变形角度测量如图19所示,柔性后缘在初始状态时尾缘在标尺刻度10 cm处,驱动柔性后缘变形,变形状态Ⅰ时尾缘达到标尺5 cm处,变形状态Ⅱ时尾缘达到标尺15 cm处,柔性后缘长度为140 mm,经实验验证所设计的柔性后缘可以达到±20°的变形。从图19中还可以看出,后缘在变形过程中表面光滑连续,未出现鼓包变形。
本文针对常规波纹结构变形骨架在变形时压缩一侧柔性蒙皮产生褶皱的问题,设计了一种带有位移约束的新型波纹结构,新型波纹结构通过施加位移约束,消除了结构在弯曲过程中伴随的压缩变形。并结合链式算法和打靶提出了新型波纹结构的大变形计算方法。通过研究,得出以下结论。
(1)基于链式算法思想,提出了波纹单元变形的计算方法;与有限元结果对比,纯弯曲工况下最大误差为0.6%,剪切弯曲工况下变形量不超过30%时最大误差为1.54%。
(2)通过引入局部坐标系设计了波纹结构的大变形计算方法。通过调控波纹数量和波纹间距得到具备不同力学性能的波纹结构,给出了变形骨架刚度的设计包络。
(3)通过引入波纹结构作为变形骨架,相较于传统依赖铰链与多连杆的机械式柔性后缘方案,在保证等效变形能力的前提下,显著降低了结构复杂度和质量水平,同时提升了结构设计的自由度与集成度。
(4)通过在关键位置施加位移约束,对结构几何变形路径进行精确调控,有效抑制了弯曲变形过程中压缩侧柔性蒙皮的褶皱失稳问题,显著提升了后缘在大变形工况下的外形保持能力。
(5)设计了展长为400 mm的变形后缘,该结构在实现±20°大幅变形的同时,仍可保持翼面光滑、连续和无缝,有利于降低驱动能量需求并维持良好的气动外形质量,体现出在轻量化、低驱动能与高外形保持能力之间的综合优势,为柔性后缘工程化设计提供了一种具有应用潜力的新途径。
 | 尹维龙 副教授,博士,主要研究方向为变体飞行器结构。 |
参考文献
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] | |
| [14] | |
| [15] | |