A Novel Point Cloud Registration Method With Error-Guided Threshold Adjustment Mechanism
Citations
LIU Guoliang, RUAN Yixin, ZHENG Yongshuai, et al. A novel point cloud registration method with error-guided threshold adjustment mechanism[J]. Aeronautical Manufacturing Technology, 2025, 68(21): 14–22.
A Novel Point Cloud Registration Method With Error-Guided Threshold Adjustment Mechanism
LIU Guoliang1
RUAN Yixin1
ZHENG Yongshuai1
ZHANG Erhu2
HUANG Zhun2
YANG Chaodong2
YUAN Ye2
1.School of Control Science and Engineering, Shandong University, Jinan250061, China
2.China Flight Test Establishment, Xi’an710089, China
Citations
LIU Guoliang, RUAN Yixin, ZHENG Yongshuai, et al. A novel point cloud registration method with error-guided threshold adjustment mechanism[J]. Aeronautical Manufacturing Technology, 2025, 68(21): 14–22.
Abstract
To address the limitations of traditional ICP (Iterative closest point) algorithms in low-overlap scenarios and under noisy interference, this paper proposes an improved ICP point cloud registration method based on an error-guided threshold adjustment mechanism. The approach aims to enhance the accuracy and robustness of point cloud registration. During the coarse registration stage, fast point feature histograms (FPFH) are combined with the random sample consensus (RANSAC) algorithm. By employing random sampling and introducing a triangle similarity constraint, distinctive corresponding point pairs are selected to estimate the initial pose transformation between point clouds. In the fine registration stage, an error-guided threshold adjustment mechanism dynamically updates the distance threshold based on the matching error in each iteration. This ensures that each point in the source point cloud is matched only to its nearest point within the adaptive threshold in the target point cloud, thereby effectively filtering out invalid correspondences. The proposed method is validated on multiple public point cloud datasets, including models with complex geometric structures and large-scale scenes. Experimental results demonstate that the method significantly improves registration accuracy and maintains robust performance even under challenging conditions such as low overlap and high noise levels.
Keywords
Point cloud registration; Iterative closest point (ICP) algorithm; Triangle similarity constraint; Random sampling consensus algorithm; Error-guided threshold adjustment;
点云模型通过精确描述物体表面轮廓,能够很好地表达物体的几何特征和空间位置。随着高精度传感器(如LiDAR、Kinect等)的快速发展,点云逐渐成为表示三维世界的主要数据形式。点云配准的作用是通过估计两个或多个点云之间的变换矩阵,使它们对齐到同一坐标系下[ LI L, MEI S, MA W J, et al. An adaptive point cloud registration algorithm based on cross optimization of local feature point normal and global surface[J]. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 6434–6447. 1]。点云配准技术在航空领域的应用非常广泛。例如,在涡轮叶片的生产中,通过使用激光扫描获取叶片的三维点云数据,结合计算机辅助设计(CAD)模型进行点云配准,可以实现高精度的叶片定位和质量控制[ 卜昆, 乔燕, 程云勇, 等. 基于定位特征点的叶片锥束CT点云模型配准方法[J]. 航空制造技术, 2015, 58(1/2): 93–96, 100.BU Kun, QIAO Yan, CHENG Yunyong, et al. Registration technology of dense point cloud of turbine blade based on positioning feature point[J]. Aeronautical Manufacturing Technology, 2015, 58(1/2): 93–96, 100. 韩奉林, 李炜健, 苏斌, 等. 基于3D点云边界点特征的航空叶片位姿识别[J]. 计算机集成制造系统, 2024, 30(12): 4233–4245.HAN Fenglin, LI Weijian, SU Bin, et al. Position and pose recognition of aviation blades based on 3D point cloud boundary point features[J]. Computer Integrated Manufacturing Systems, 2024, 30(12): 4233–4245. 2-3];在航空发动机的装配过程中,通过三维点云数据与设计模型的配准,确保各个部件的精确装配,从而提升了航空发动机的装配效率和质量[ 任彬, 汪小雨. 基于点云配准的航空发动机数字孪生模型构建[J]. 机械设计与制造, 2024(3): 234–238.REN Bin, WANG Xiaoyu. Digital twin model construction of aero-engine based on point cloud registration[J]. Machinery Design & Manufacture, 2024(3): 234–238. 4]。点云配准技术为航空工业提供了高效、精准的生产与质量控制手段。
迭代最近点(Iterative closest point,ICP)算法是应用最广泛的点云配准方法之一。该算法通过迭代寻找源点云与目标点云之间的最近邻点对,并优化变换参数以最小化欧氏距离误差,从而实现高精度对齐[ GUO F, ZHENG W B, LIAN G F, et al. A point cloud registration method based on multiple-local-feature matching[J]. Optik, 2023, 295: 171511. 刘峻峰, 何小妹, 黄翔, 等. ICP算法在叶型点云数据配准中的应用[J]. 航空制造技术, 2019, 62(12): 79–82.LIU Junfeng, HE Xiaomei, HUANG Xiang, et al. Application of ICP algorithm in data registration of blade profile point cloud[J]. Aeronautical Manufacturing Technology, 2019, 62(12): 79–82. 5-6]。然而,标准ICP算法高度依赖初始位置,当点云之间存在较低重叠率或较大姿态差异时,其配准效果较差,且对噪声较为敏感,容易陷入局部最优解。Chetverikov等[ CHETVERIKOV D, STEPANOV D, KRSEK P. Robust Euclidean alignment of 3D point sets: The trimmed iterative closest point algorithm[J]. Image and Vision Computing, 2005, 23(3): 299–309. 7]提出TrICP(Trimmed ICP)算法,该方法引入重叠率,仅在重叠区域内进行配准,从而减少非重叠区域带来的误差。Pavlov等[ PAVLOV A L, OVCHINNIKOV G W, DERBYSHEV D Y, et al. AA–ICP: Iterative closest point with Anderson acceleration[C]//Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2018. 8]提出AA–ICP算法,通过Anderson加速技术提升收敛速度与稳定性。还有研究者提出基于距离阈值的改进ICP算法,通常采用固定的最大距离阈值[ BEHLEY J, STACHNISS C. Efficient surfel-based SLAM using 3D laser range data in urban environments[J/OL]. (2018–06–26)[2025–01–15]. https://roboticsproceedings.org/rss14/p16.pdf. VIZZO I, CHEN X, CHEBROLU N, et al. Poisson surface reconstruction for LiDAR odometry and mapping[C]//Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA). New York: ACM, 2021. 9-10],将超出该阈值的对应点视为异常值并忽略。为应对ICP算法对初始位姿敏感的问题,点云配准算法多采用粗配准与精配准相结合的策略。粗配准阶段快速且稳健地估算初始变换,为精配准提供良好的起点。常见的粗配准方法包括基于4点共面的4PCS算法和RANSAC算法。其中,RANSAC算法通过随机采样对应点对构建初始变换矩阵,并利用一致性校验选出最优变换,适用于高噪声点云配准场景[ LI Z X, SHAN J. RANSAC-based multi primitive building reconstruction from 3D point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 185: 247–260. 11];4PCS算法则在两个点云中寻找4点共面集以计算初始姿态[ TAO W Y, LIU J B, XU D, et al. Automatic registration of point clouds by combining local shape descriptor and G4PCS algorithm[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 6339–6351. 12]。
同时,特征描述在点云配准任务中也至关重要。快速点特征直方图(Fast point feature histograms,FPFH)[ ZHENG L, LI Z K. Virtual namesake point multi-source point cloud data fusion based on FPFH feature difference[J]. Sensors, 2021, 21(16): 5441. 13]和方向直方图(Signature of histogram of orientations,SHOT)[ SALTI S, TOMBARI F, DI STEFANO L. SHOT: Unique signatures of histograms for surface and texture description[J]. Computer Vision and Image Understanding, 2014, 125: 251–264. 14]等描述子被广泛用于粗配准阶段,它们通过提取局部几何特征,实现对部分重叠或噪声数据的鲁棒匹配。将此类描述子与4PCS或RANSAC算法相结合,有助于显著提升点云配准的鲁棒性与准确性。
随着深度学习技术快速发展,研究者开始尝试将之应用于点云配准任务。Qi等[ QI C R, SU H, MO K, et al. PointNet: Deep learning on point sets for 3D classification and segmentation[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2017. 15]提出PointNet网络,能够直接从输入点云中提取特征,有效应对点云的无序性与旋转不变性问题。D3Feat[ BAI X Y, LUO Z X, ZHOU L, et al. D3Feat: Joint learning of dense detection and description of 3D local features[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020. 16]、PointDSC[ BAI X Y, LUO Z X, ZHOU L, et al. PointDSC: Robust point cloud registration using deep spatial consistency[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021. 17]和HRegNet[ LU F, CHEN G, LIU Y L, et al. HRegNet: A hierarchical network for large-scale outdoor LiDAR point cloud registration[C]//Proceedings of 2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021. 18]等方法,均采用学习型特征检测器与描述子来完成大规模场景下的点云配准。Pan等[ PAN L, CAI Z A, LIU Z W. Robust partial-to-partial point cloud registration in a full range[J]. IEEE Robotics and Automation Letters, 2024, 9(3): 2861–2868. 19]提出了GMCNet(Graph matching consensus network)网络,该方法在变换鲁棒点云变换器模块(Transformation robust point transformer,TPT)中融合手工构造的旋转不变特征与抗噪的空间坐标信息,以生成鲁棒性较高的点云描述子,在部分重叠场景中表现优异。尽管深度学习方法在点云配准中具有一定优势,但它对训练数据与计算资源依赖较大,在不同应用场景中的泛化能力有待提升。
(2)随机采样与相似性约束。粗配准的核心思想是通过随机选择少量点进行匹配。本文在基于RANSAC的粗配准阶段引入了相似性约束策略[ SUN L. RANSIC: Fast and highly robust estimation for rotation search and point cloud registration using invariant compatibility[J]. IEEE Robotics and Automation Letters, 2022, 7(1): 143–150. 20],以提高鲁棒性和精度。具体来说,从源点云和目标点云的显著特征点集合中,随机选择3对对应点,形成两个三角形。通过计算这些三角形的边长比例,建立相似性关系,即
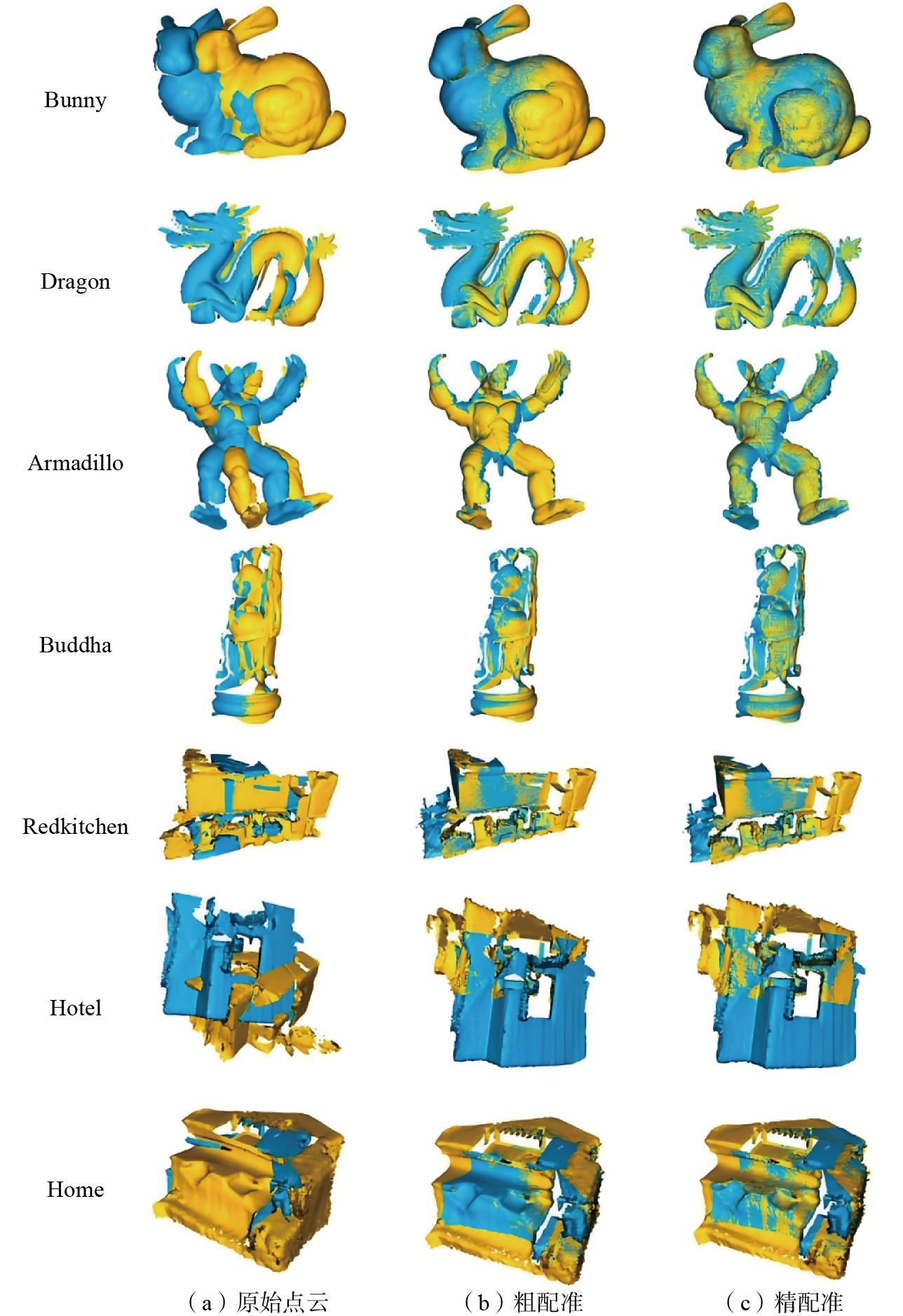
对比试验在3个公共数据集上进行。第1个数据集是斯坦福3D扫描数据集(Stanford 3D scanning repository),它包含多个高分辨率的三维模型,具有极高的几何细节和精度;第2个是7–Scenes,是用于室内场景理解的点云数据集;第3个是SUN3D,它是由麻省理工学院发布的大规模RGB–D数据集。表1列出了试验所用的每个点云数据的参数。
表1 对比试验使用的点云数据
Table 1 Point cloud data used in experiments
数据集
点云数据(源/目标点云)
点云点数规模
Stanford 3D扫描数据集
Bunny45/Bunny00
40096/40256
Dragon24/Dragon00
34836/41841
Armadillo30/Armadillo00
29885/32385
Buddha48/Buddha24
69158/75582
7–Scenes
Redkitchen11/Redkitchen12
264291/239704
SUN3D
Hotel3/Hotel4
357247/465395
Home12/Home13
261315/178224
将本文方法与以下点云配准方法进行比较:(1)FPFH特征+贪婪投影三角测量(GPT)+ICP方法[ LIU J, BAI D, CHEN L. 3–D point cloud registration algorithm based on greedy projection triangulation[J]. Applied Sciences, 2018, 8(10): 1776. 21](FPFH+GPT+ICP);(2)ISS关键点+3DSC特征+ICP方法[ XU G X, PANG Y J, BAI Z X, et al. A fast point clouds registration algorithm for laser scanners[J]. Applied Sciences, 2021, 11(8): 3426. 22](ISS+3DSC+ICP);(3)多特征描述子(MLF)+ICP方法[ GUO F, ZHENG W B, LIAN G F, et al. A point cloud registration method based on multiple-local-feature matching[J]. Optik, 2023, 295: 171511. 5](MLF+ICP)。所有试验均在一台计算机(配置为Inter Core i7–7700 CPU,8G RAM)上进行。
LIL, MEIS, MAW J, et al. An adaptive point cloud registration algorithm based on cross optimization of local feature point normal and global surface[J]. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 6434–6447.
[2]
卜昆, 乔燕, 程云勇, 等. 基于定位特征点的叶片锥束CT点云模型配准方法[J]. 航空制造技术, 2015, 58(1/2): 93–96, 100. BUKun, QIAOYan, CHENGYunyong, et al. Registration technology of dense point cloud of turbine blade based on positioning feature point[J]. Aeronautical Manufacturing Technology, 2015, 58(1/2): 93–96, 100.
[3]
韩奉林, 李炜健, 苏斌, 等. 基于3D点云边界点特征的航空叶片位姿识别[J]. 计算机集成制造系统, 2024, 30(12): 4233–4245. HANFenglin, LIWeijian, SUBin, et al. Position and pose recognition of aviation blades based on 3D point cloud boundary point features[J]. Computer Integrated Manufacturing Systems, 2024, 30(12): 4233–4245.
[4]
任彬, 汪小雨. 基于点云配准的航空发动机数字孪生模型构建[J]. 机械设计与制造, 2024(3): 234–238. RENBin, WANGXiaoyu. Digital twin model construction of aero-engine based on point cloud registration[J]. Machinery Design & Manufacture, 2024(3): 234–238.
[5]
GUOF, ZHENGW B, LIANG F, et al. A point cloud registration method based on multiple-local-feature matching[J]. Optik, 2023, 295: 171511.
[6]
刘峻峰, 何小妹, 黄翔, 等. ICP算法在叶型点云数据配准中的应用[J]. 航空制造技术, 2019, 62(12): 79–82. LIUJunfeng, HEXiaomei, HUANGXiang, et al. Application of ICP algorithm in data registration of blade profile point cloud[J]. Aeronautical Manufacturing Technology, 2019, 62(12): 79–82.
[7]
CHETVERIKOVD, STEPANOVD, KRSEKP. Robust Euclidean alignment of 3D point sets: The trimmed iterative closest point algorithm[J]. Image and Vision Computing, 2005, 23(3): 299–309.
[8]
PAVLOVA L, OVCHINNIKOVG W, DERBYSHEVD Y, et al. AA–ICP: Iterative closest point with Anderson acceleration[C]//Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE, 2018.
[9]
BEHLEYJ, STACHNISSC. Efficient surfel-based SLAM using 3D laser range data in urban environments[J/OL]. (2018–06–26)[2025–01–15]. https://roboticsproceedings.org/rss14/p16.pdf.
[10]
VIZZOI, CHENX, CHEBROLUN, et al. Poisson surface reconstruction for LiDAR odometry and mapping[C]//Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA). New York: ACM, 2021.
[11]
LIZ X, SHANJ. RANSAC-based multi primitive building reconstruction from 3D point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 185: 247–260.
[12]
TAOW Y, LIUJ B, XUD, et al. Automatic registration of point clouds by combining local shape descriptor and G4PCS algorithm[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 6339–6351.
[13]
ZHENGL, LIZ K. Virtual namesake point multi-source point cloud data fusion based on FPFH feature difference[J]. Sensors, 2021, 21(16): 5441.
[14]
SALTIS, TOMBARIF, DI STEFANOL. SHOT: Unique signatures of histograms for surface and texture description[J]. Computer Vision and Image Understanding, 2014, 125: 251–264.
[15]
QIC R, SUH, MOK, et al. PointNet: Deep learning on point sets for 3D classification and segmentation[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2017.
[16]
BAIX Y, LUOZ X, ZHOUL, et al. D3Feat: Joint learning of dense detection and description of 3D local features[C]//Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2020.
[17]
BAIX Y, LUOZ X, ZHOUL, et al. PointDSC: Robust point cloud registration using deep spatial consistency[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE, 2021.
[18]
LUF, CHENG, LIUY L, et al. HRegNet: A hierarchical network for large-scale outdoor LiDAR point cloud registration[C]//Proceedings of 2021 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE, 2021.
[19]
PANL, CAIZ A, LIUZ W. Robust partial-to-partial point cloud registration in a full range[J]. IEEE Robotics and Automation Letters, 2024, 9(3): 2861–2868.
[20]
SUNL. RANSIC: Fast and highly robust estimation for rotation search and point cloud registration using invariant compatibility[J]. IEEE Robotics and Automation Letters, 2022, 7(1): 143–150.
[21]
LIUJ, BAID, CHENL. 3–D point cloud registration algorithm based on greedy projection triangulation[J]. Applied Sciences, 2018, 8(10): 1776.
[22]
XUG X, PANGY J, BAIZ X, et al. A fast point clouds registration algorithm for laser scanners[J]. Applied Sciences, 2021, 11(8): 3426.