High-Precision Fast Fitting Method for Part Surface Features in HUD-Oriented High-Fidelity Virtual Assembly
Citations
PAN Gaojian, ZHANG Shangan, ZHANG Zhengyu, et al. High-precision fast fitting method for part surface features in HUD-oriented high-fidelity virtual assembly[J]. Aeronautical Manufacturing Technology, 2025, 68(12): 82-93.
1.College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing210016, China
2.AVIC XAC Commercial Aircraft Co., Ltd., Xi’an710089, China
Citations
PAN Gaojian, ZHANG Shangan, ZHANG Zhengyu, et al. High-precision fast fitting method for part surface features in HUD-oriented high-fidelity virtual assembly[J]. Aeronautical Manufacturing Technology, 2025, 68(12): 82-93.
Abstract
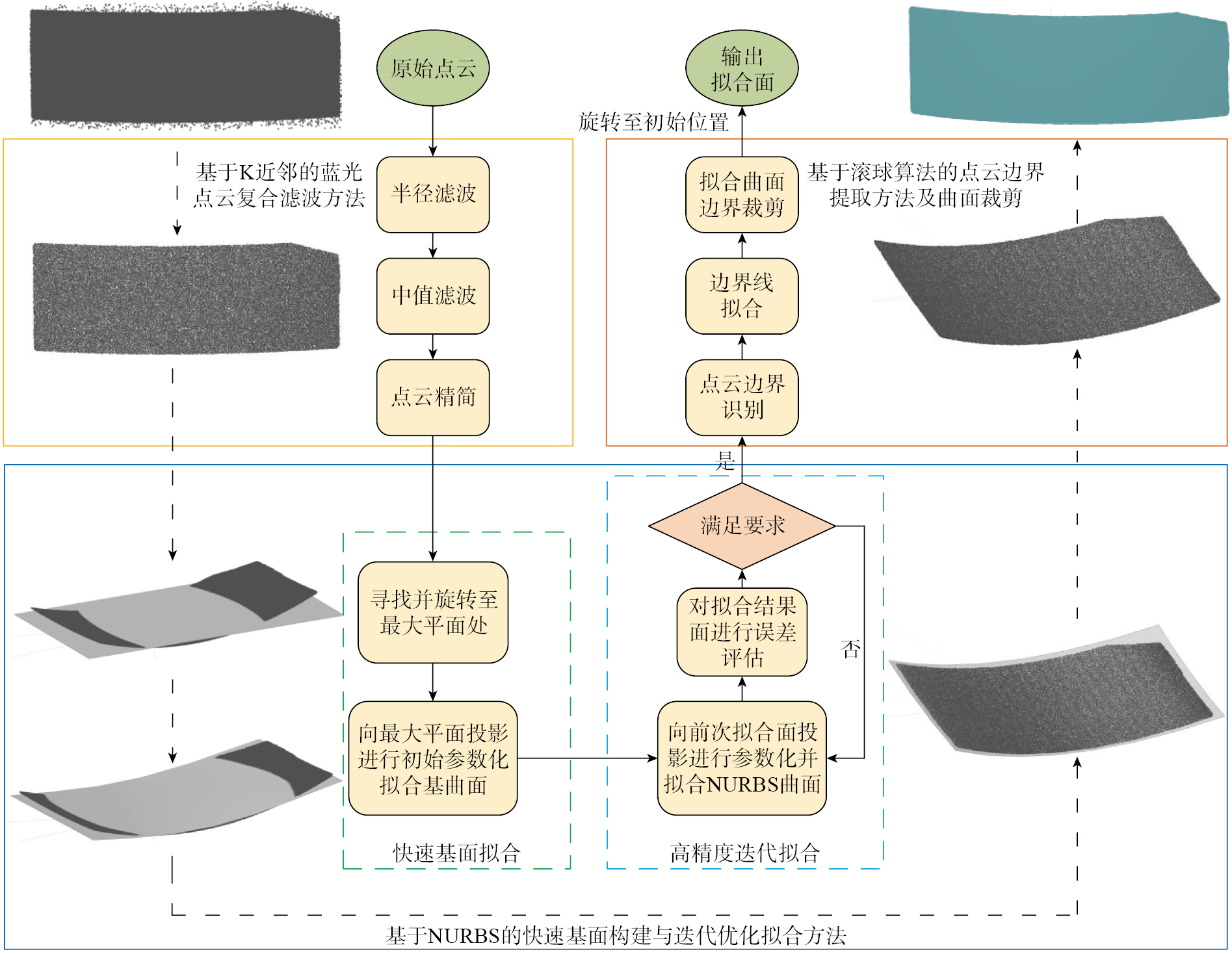
Aiming at the requirement of high precision and fast fitting of surface features of parts in high-fidelity virtual assembly of head-up display (HUD) devices of automobiles and aircraft, a blue-ray random point cloud processing and fitting method is proposed. Firstly, the K-nearest neighbor point cloud combination filtering method is used to remove noise points and redundant points. Secondly, the internal surface of the filtered point cloud is quickly fitted based on the fast base surface construction and iterative optimization fitting method of non-uniform rational B-splines (NURBS). Finally, the point cloud boundary extraction and surface cutting are carried out based on the rolling ball algorithm to obtain high-precision surface features which could accurately reflect the point cloud boundary information. A complete set of HUD system standard parts was designed and processed, and the blue-ray point cloud of the main mirror was obtained to carry out fitting accuracy and efficiency evaluation experiments. By comparing the fitting surfaces of the proposed method, commercial software method and literature method with the surface data obtained by three coordinates accordingly, it can be concluded that the proposed method can achieve micron fitting accuracy on the premise of significantly improved fitting efficiency, and can meet the technical requirements of high-fidelity virtual assembly.
Keywords
Scattered point cloud; Point cloud denoising; Free-form surface; High-precision fitting; Point cloud boundary identification;
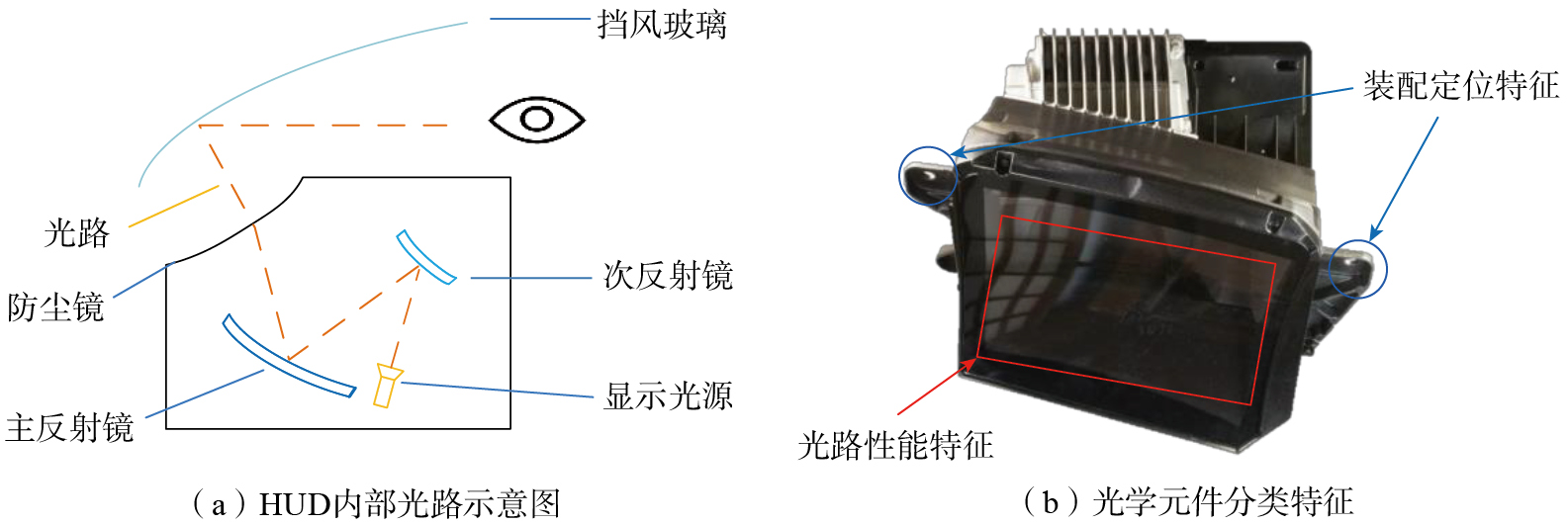
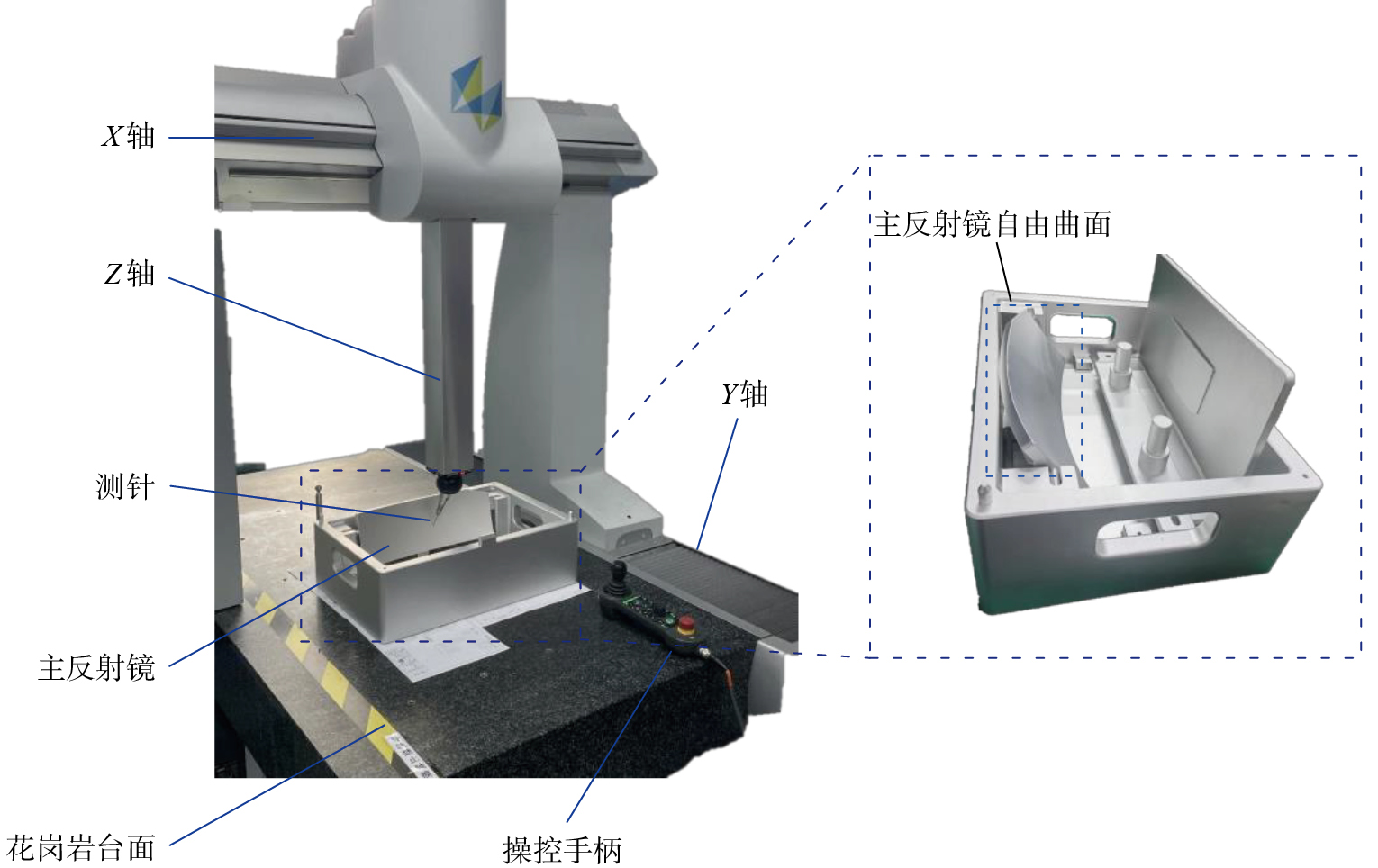
作为面向复杂高精度系统的新兴技术,实测模型驱动的高保真虚拟装配涉及高精度点云数据获取、装配–性能特征识别重构、基于重构特征的可装配性分析等内容[ ABIDI M H, AL-AHMARI A, AHMAD A, et al. Assessment of virtual reality-based manufacturing assembly training system[J]. The International Journal of Advanced Manufacturing Technology, 2019, 105(9): 3743–3759. 1]。该技术的核心在于通过高精度拟合方法将装配与性能特征进行重构以表征制造偏差,而后基于实测模型开展带偏差装配[ NEPOMILUEV V V, SEMENOV A N. Virtual testing in assembly[J]. Russian Engineering Research, 2019, 39(7): 625–627. 2],厘清装配误差累积规律,通过零件影响度分析、二次分拣等手段提高产品的一次装配成功率。HUD作为典型高精度多装配层级产品,其性能高度依赖于内部光路装配精度,导致其装配难度与成本居高不下,而高保真虚拟装配的出现使得基于零件制造误差分析和装配误差溯源的低成本、高精度HUD装配成为可能。对于图1(b)中的反射镜,仅需将装配定位特征——轴和性能验证特征——自由曲面进行拟合,即可根据定位特征将反射镜与其他零部件进行装配,而后根据曲面性能特征验证光路的准确性,完成可装配性分析。高保真虚拟装配涉及多个关键技术点,其中将物质实体转换为数字模型是虚拟装配技术的基础,后续的光路模拟和装配仿真等重要应用都基于数字模型开展。因此实体光学元件的数字化是虚拟装配的前提,高精度的拟合才能保证虚拟装配中所有计算结果的准确性,快速的拟合才能提高虚拟装配整体流程的效率,故曲面特征高精度快速拟合是光学元件数字化的关键技术点。HUD系统中曲面特征精度与光路精度直接相关,为准确表达制造偏差,其拟合精度需达μm级且保证一定的拟合效率,即HUD系统的高保真虚拟装配给自由曲面类特征的光学元件重构提出了超高精度的快速拟合需求。
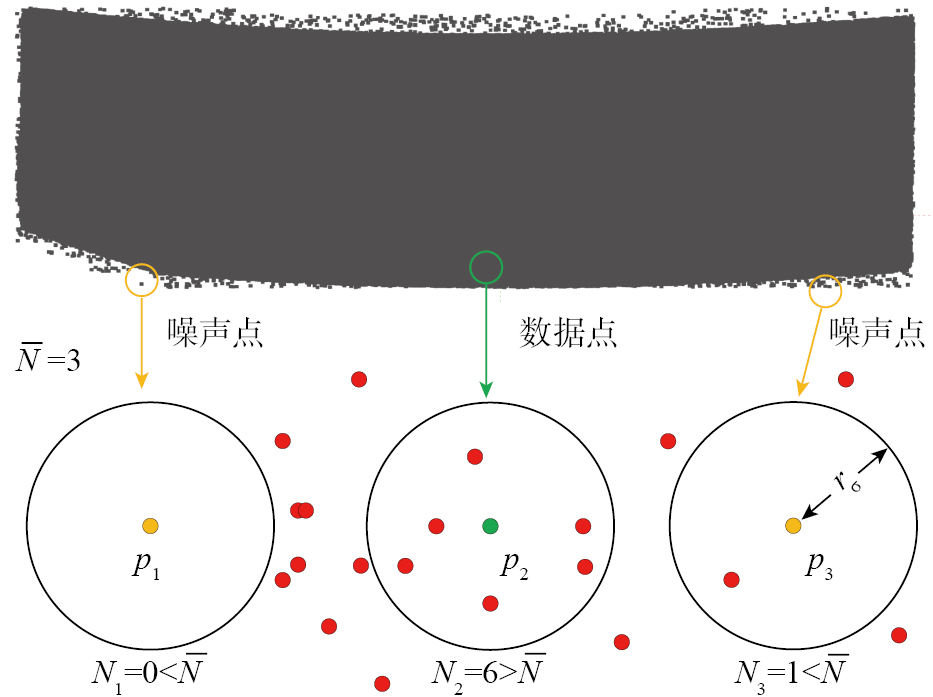
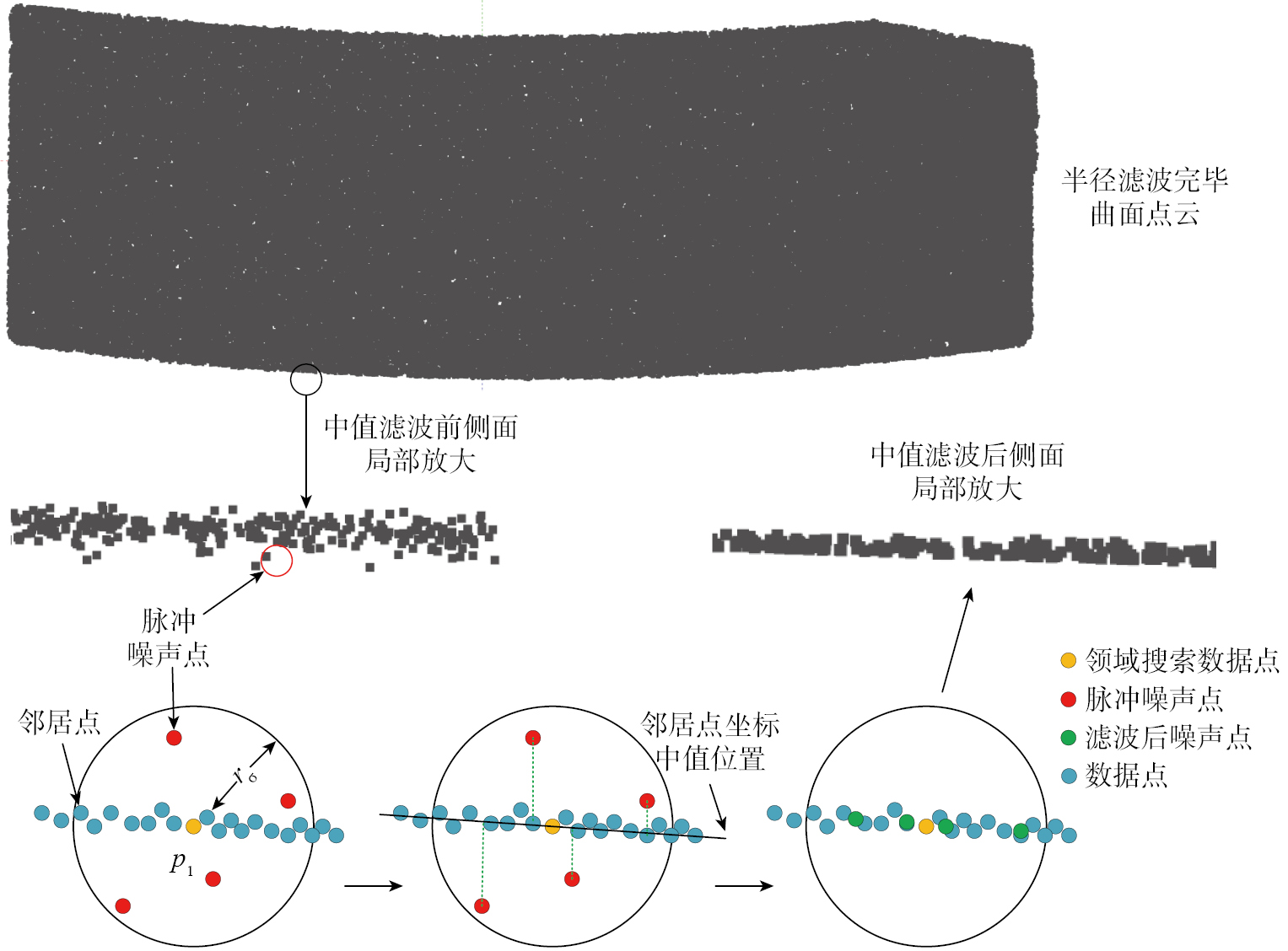
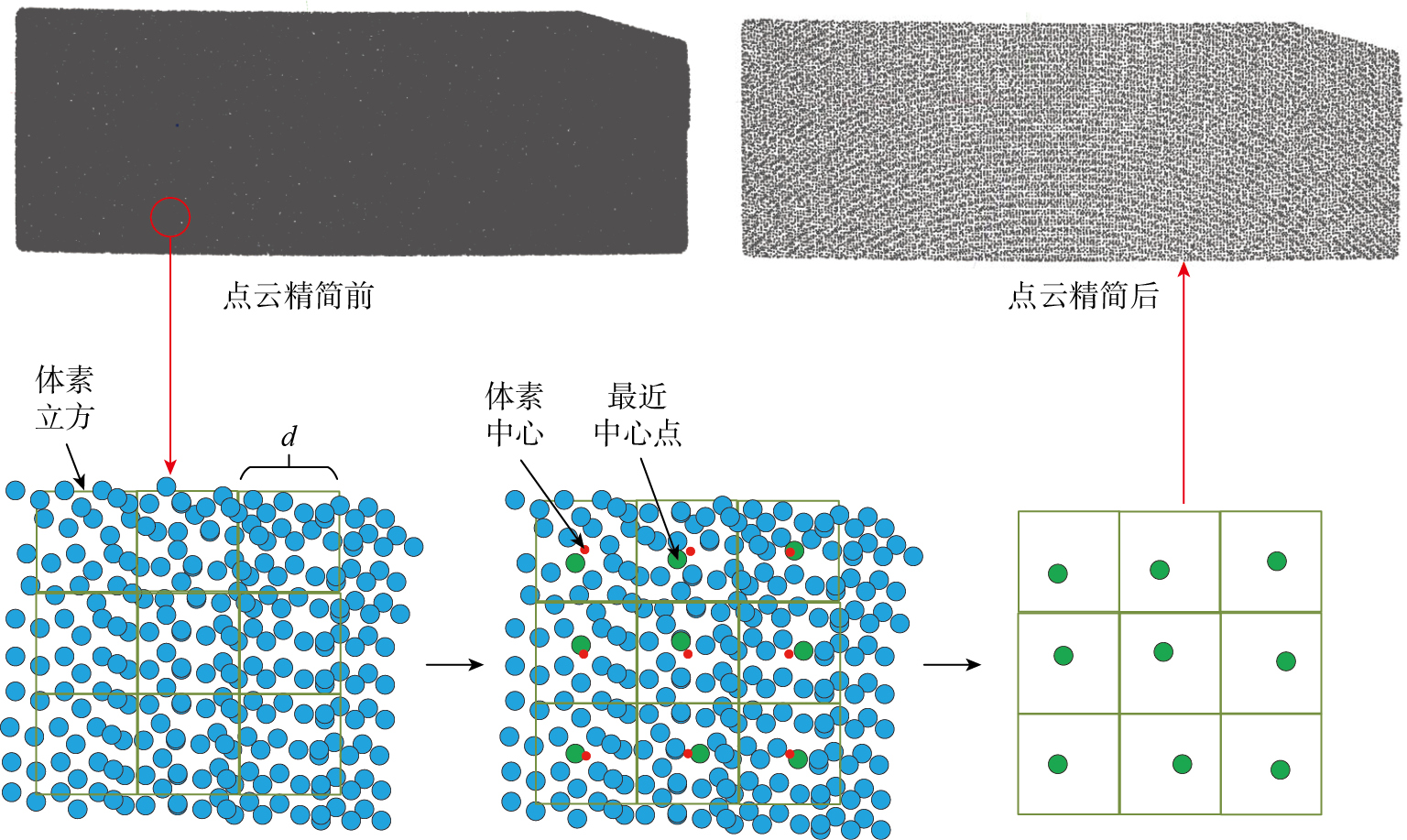
高精度快速曲面拟合需要低噪声的适量点云数据,可通过滤除噪声与冗余点来获取完整、准确的测量数据[ 戴静兰. 海量点云预处理算法研究[D]. 杭州: 浙江大学, 2006.DAI Jinglan. A research on preprocessing algorithms of mass point cloud[D]. Hangzhou: Zhejiang University, 2006. 3]。谷晓英[ 谷晓英. 三维重建中点云数据处理关键技术研究[D]. 秦皇岛: 燕山大学, 2015.GU Xiaoying. Research on the key technologies of point clouds processing in 3D reconstruction[D]. Qinhuangdao: Yanshan University, 2015. 4]提出一种基于法矢修正的点云去噪平滑算法;张毅等[ 张毅, 刘旭敏, 隋颖, 等. 基于K-近邻点云去噪算法的研究与改进[J]. 计算机应用, 2009, 29(4): 1011–1014.ZHANG Yi, LIU Xumin, SUI Ying, et al. Research and improvement of denoising method based on K-neighbors[J]. Journal of Computer Applications, 2009, 29(4): 1011–1014. 5]通过K近邻搜索建立点云拓扑关系,对噪声点进行去除;封雷等[ 封雷, 朱登明, 李兆歆, 等. 一种基于遮罩的稀疏点云滤波算法[J]. 计算机科学, 2022, 49(5): 25–32.FENG Lei, ZHU Dengming, LI Zhaoxin, et al. Sparse point cloud filtering algorithm based on mask[J]. Computer Science, 2022, 49(5): 25–32. 6]提出基于遮罩的稀疏点云滤波算法,利用深度搜索算法区分离群点;刘大峰等[ 刘大峰, 廖文和, 戴宁, 等. 散乱点云去噪算法的研究与实现[J]. 东南大学学报(自然科学版), 2007, 37(6): 1108–1112.LIU Dafeng, LIAO Wenhe, DAI Ning, et al. Research and implementation for denoising noisy scattered point data[J]. Journal of Southeast University (Natural Science Edition), 2007, 37(6): 1108–1112. 7]提出一种快速去除散乱点云数据噪声的鲁棒滤波算法;周煜等[ 周煜, 张万兵, 杜发荣, 等. 散乱点云数据的曲率精简算法[J]. 北京理工大学学报, 2010, 30(7): 785–789.ZHOU Yu, ZHANG Wanbing, DU Farong, et al. Algorithm for reduction of scattered point cloud data based on curvature[J]. Transactions of Beijing Institute of Technology, 2010, 30(7): 785–789. 8]提出了以平均曲率为判据的精简算法。
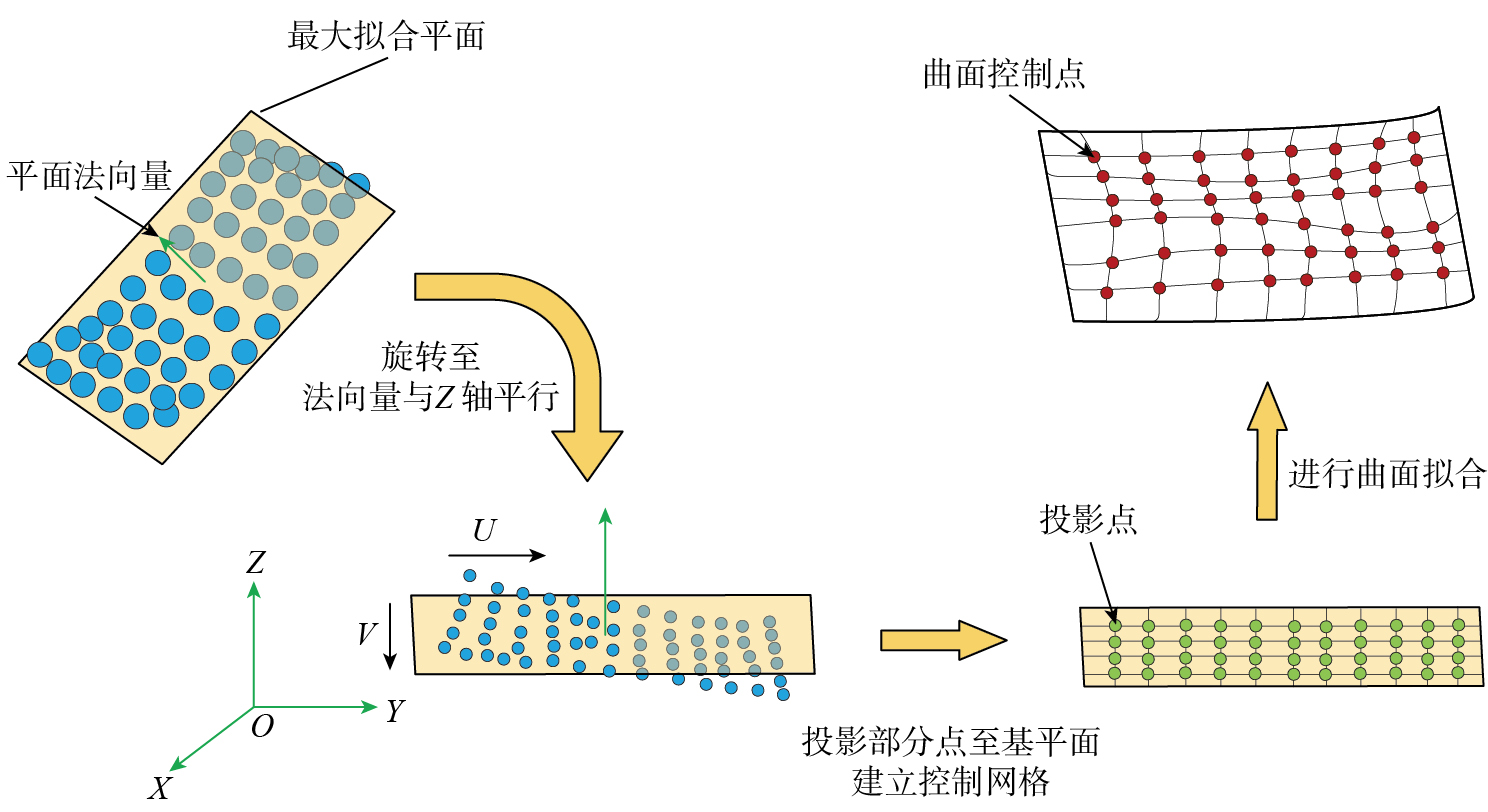
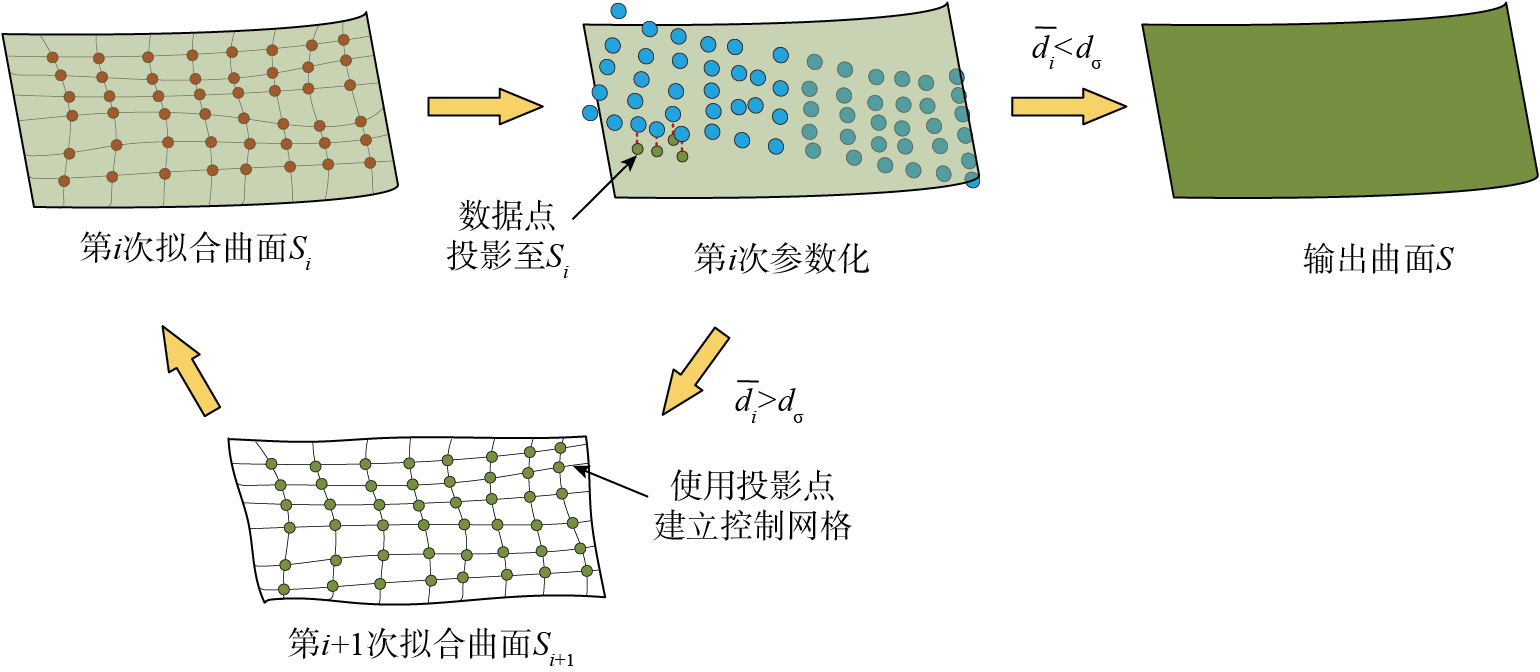
自由曲面拟合可分为基于非均匀有理B样条(Non-uniform rational B-splines,NURBS)和基于三角网格建模两种方法[ 隋连升, 蒋庄德. 栅格型点云数据的自由曲面建模技术研究[J]. 计算机辅助设计与图形学学报, 2003, 15(10): 1293–1297.SUI Liansheng, JIANG Zhuangde. Free form surface modeling with grid cloud data[J]. Journal of Computer Aided Design & Computer Graphics, 2003, 15(10): 1293–1297. 9]。其中,作为目前在CAD中应用最为广泛的曲面形式[ 贺美芳. 基于散乱点云数据的曲面重建关键技术研究[D]. 南京: 南京航空航天大学, 2006.HE Meifang. Research on key technologies of surfaces reconstruction based on scattered point cloud data[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2006. 10],国内研究人员对NURBS曲面进行了大量研究,如史桂蓉等[ 史桂蓉, 邢渊, 张永清. 反向工程几何建模自动化系统[J]. 上海交通大学学报, 2000, 34(3): 392–395.SHI Guirong, XING Yuan, ZHANG Yongqing. Reverse-engineering automatic geometry modelling system[J]. Journal of Shanghai Jiao Tong University, 2000, 34(3): 392–395. 11]先使用简单曲面对模型建立对应拓扑,再拟合连续曲率曲面;张开源等[ 张开源, 郑德华, 张崇军. 基于点云切片技术的曲面拟合方法研究[J]. 地理空间信息, 2018, 16(12): 35–37, 48, 9.ZHANG Kaiyuan, ZHENG Dehua, ZHANG Chongjun. Research on the surface fitting method based on point cloud slicing[J]. Geospatial Information, 2018, 16(12): 35–37, 48, 9. 12]先对点云降维处理进行平面拟合,而后进行移动最小二乘(MLS)光滑而获得最终曲面;曾清红等[ 曾清红, 卢德唐. 基于移动最小二乘法的曲线曲面拟合[J]. 工程图学学报, 2004, 25(1): 84–89.ZENG Qinghong, LU Detang. Curve and surface fitting based on moving least-squares methods[J]. Journal of Engineering Graphics, 2004, 25(1): 84–89. 13]建立了一种基于MLS的曲面拟合方法;付玮等[ 付玮, 吴禄慎, 陈华伟. 基于免疫遗传和蚁群融合算法的散乱点云曲面拟合[J]. 农业机械学报, 2016, 47(12): 424–430.FU Wei, WU Lushen, CHEN Huawei. Scattered point clouds surface fitting based on immune genetic and ant colony algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12): 424–430. 14]基于免疫遗传算法对参数化阶段的节点进行自适应计算而完成了曲面拟合。三角网格拟合同样应用广泛,Lin等[ LIN A C, CHEN C F. Point-data processing and error analysis in reverse engineering[J]. The International Journal of Advanced Manufacturing Technology, 1998, 14(11): 824–834. 15]利用切平面线形逼近待重建曲面的局部形状来输出三角化曲面;Weir[ WEIR D J, MILROY M J, BRADLEY C, et al. Reverse engineering physical models employing wrap-around B-spline surfaces and quadrics[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 1996, 210(2): 147–157. 16]和来新民[ 来新民, 黄田, 曾子平, 等. 基于NURBS的散乱数据点自由曲面重构[J]. 计算机辅助设计与图形学学报, 1999, 11(5): 433–436.LAI Xinmin, HUANG Tian, ZENG Ziping, et al. NURBS based approach of surface reconstruction from scattered data[J]. Journal of Computer Aided Design & Computer Graphics, 1999, 11(5): 433–436. 17]等通过构建网格模型建立基础Delaunay三角域,使用边匹配算法得到四边界区域;何华[ 何华. 散乱点云数据三角网格曲面重建研究[D]. 郑州: 战略支援部队信息工程大学, 2018.HE Hua. On triangle mesh surface reconstruction for scattered point clouds[D]. Zhengzhou: PLA Strategic Support Force Information Engineering University, 2018. 18]提出了一种基于局部特征尺寸的非均匀点云自适应曲面重建算法。
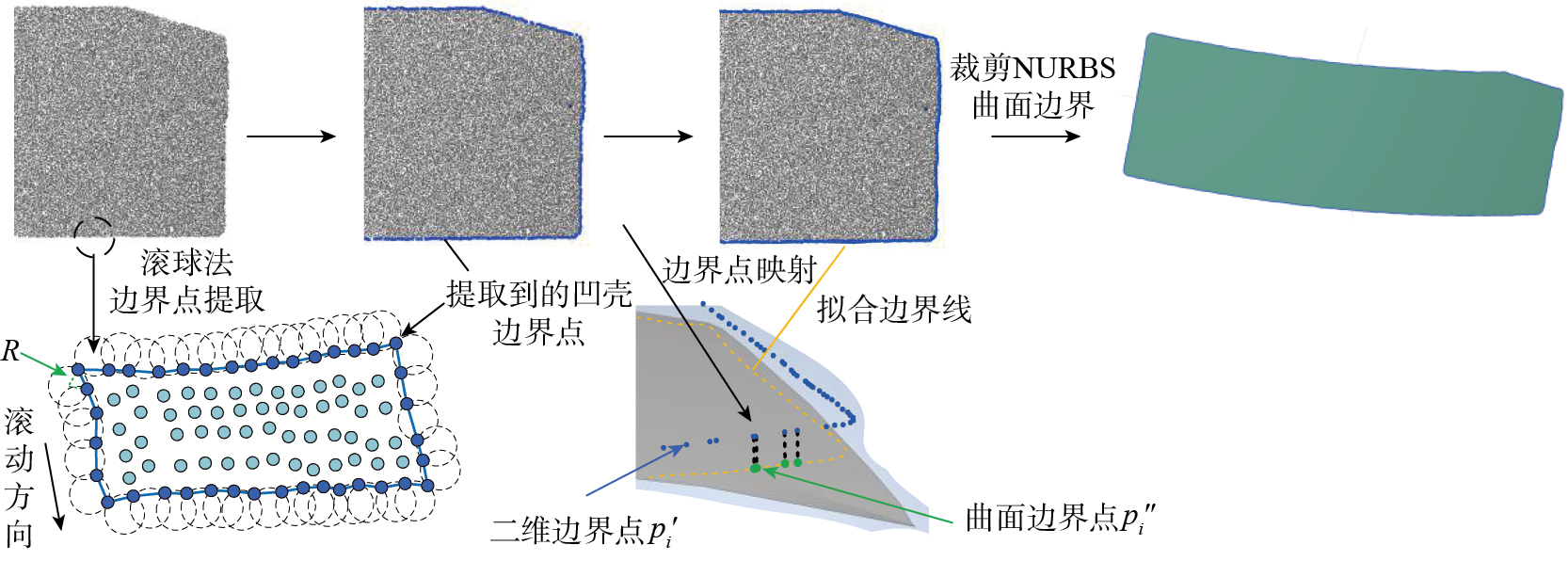
目标点云边界区域形状复杂,需在拟合中生成曲面边界线或对拟合后曲面进行裁剪。Farin[ FARIN G. Curvature continuity and offsets for piecewise conics[J]. ACM Transactions on Graphics, 1989, 8(2): 89–99. 19]利用双线性孔斯曲面生成B样条曲面控制网格,再将该网格转化为具有固定边界的NURBS曲面。王若莹等[ 王若莹, 邵利平. NURBS边界曲面直接生成法[J]. 计算机应用, 2008, 28(1): 174–176, 180.WANG Ruoying, SHAO Liping. Direct generation method of NURBS boundary surface[J]. Journal of Computer Applications, 2008, 28(1): 174–176, 180. 20]提出了一种直接通过孔斯曲面插值生成NURBS曲面的方法,以提升拟合效率。
使用NURBS节点插值法[ 黄紫双. 基于NURBS的曲面拟合和优化方法研究[D]. 秦皇岛: 燕山大学, 2020.HUANG Zishuang. Research on surface fitting and optimization method based on NURBS[D]. Qinhuangdao: Yanshan University, 2020. 22]分别对本文方法与软件方法的滤波结果进行点云曲面拟合,结果如图11所示。可以看出,CloudCompare软件方法的拟合整体精度差,合格点占比仅为6.14%,且拟合面存在大量褶皱与扭曲(图11(a)),而使用本文方法滤波后的点云拟合面精度较高,光滑度更好(图11(b))。可见本文方法的滤波结果可提高NURBS曲面拟合的精度与光滑度,同时计算效率也远优于CloudCompare软件方法。
图11 两种方法滤波结果的曲面拟合误差对比
Fig.11 Surface fitting error comparison of two methods
2.2 曲面拟合精度对比验证试验
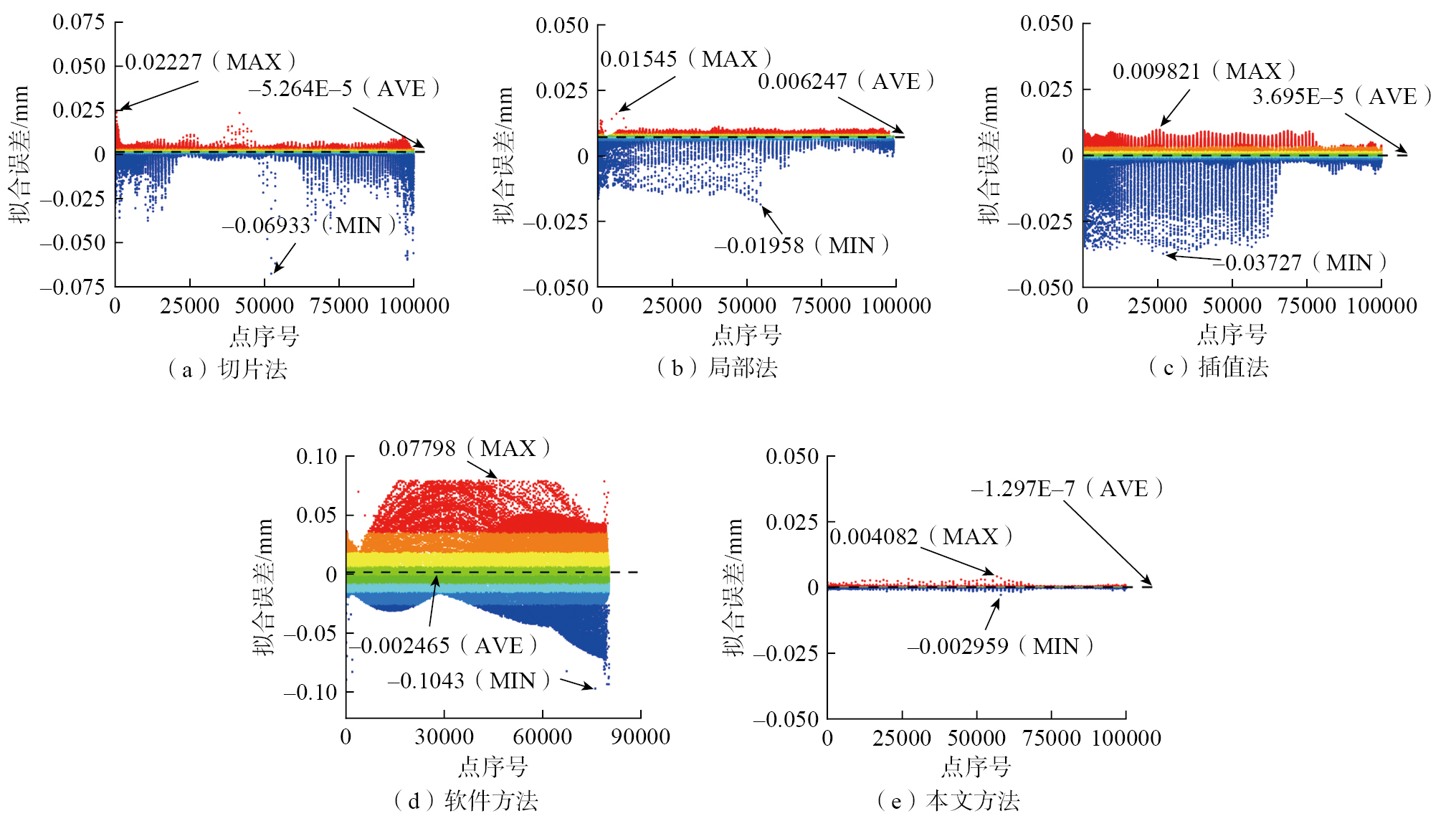
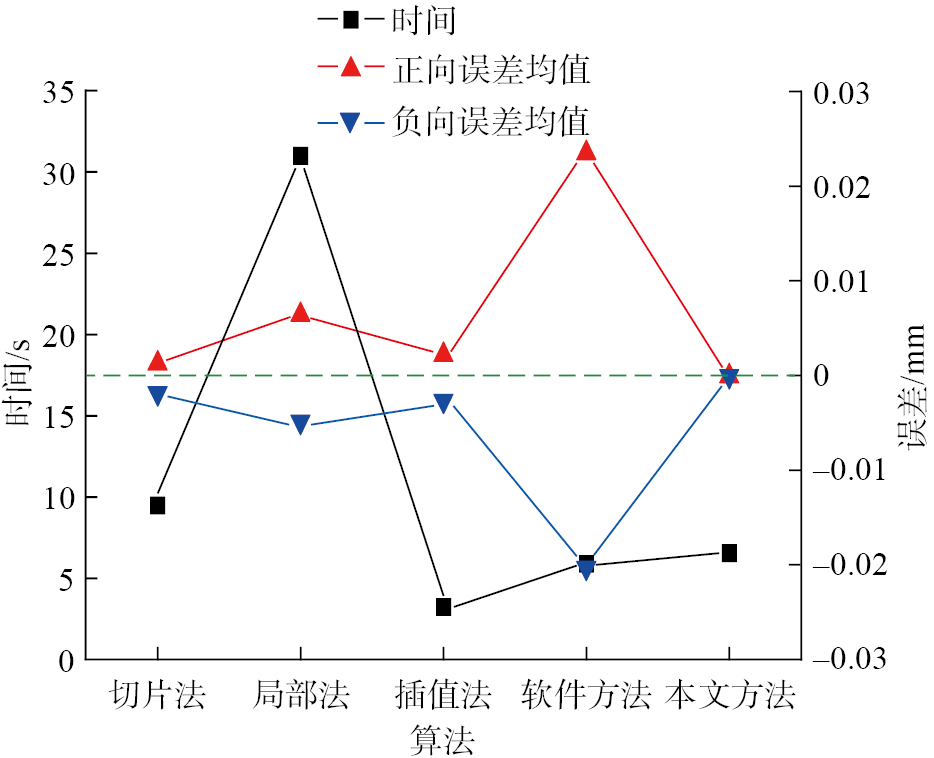
以本文滤波方法处理后的结果点云作为拟合对象,分别使用NURBS切片拟合法[ 张开源, 郑德华, 张崇军. 基于点云切片技术的曲面拟合方法研究[J]. 地理空间信息, 2018, 16(12): 35–37, 48, 9.ZHANG Kaiyuan, ZHENG Dehua, ZHANG Chongjun. Research on the surface fitting method based on point cloud slicing[J]. Geospatial Information, 2018, 16(12): 35–37, 48, 9. 12]、NURBS局部拟合法[ 曾清红, 卢德唐. 基于移动最小二乘法的曲线曲面拟合[J]. 工程图学学报, 2004, 25(1): 84–89.ZENG Qinghong, LU Detang. Curve and surface fitting based on moving least-squares methods[J]. Journal of Engineering Graphics, 2004, 25(1): 84–89. 13]、NURBS节点插值法[ 黄紫双. 基于NURBS的曲面拟合和优化方法研究[D]. 秦皇岛: 燕山大学, 2020.HUANG Zishuang. Research on surface fitting and optimization method based on NURBS[D]. Qinhuangdao: Yanshan University, 2020. 22]、主流商用软件PolyWorks的NURBS拟合功能模块和本文方法进行拟合,并在相同坐标系下计算标定点云至各个拟合面的法向距离,将该距离作为误差指标以评价拟合精度,对比几种方法的误差极值、均值与标准差,如表4所示。可以看出,本文方法拟合的最大正向误差仅为节点插值法的41.6%;最大负向误差仅为局部拟合法的15.1%;与其他4种算法中的最优算法(插值法)相比,平均误差精度提升了2个数量级,在稳定性方面表现优异,并能反映点云边界信息。
表4 不同算法的拟合结果对比
Table 4 Comparison of simulation results of different algorithms
ABIDIM H, AL-AHMARIA, AHMADA, et al. Assessment of virtual reality-based manufacturing assembly training system[J]. The International Journal of Advanced Manufacturing Technology, 2019, 105(9): 3743–3759.
[2]
NEPOMILUEVV V, SEMENOVA N. Virtual testing in assembly[J]. Russian Engineering Research, 2019, 39(7): 625–627.
[3]
戴静兰. 海量点云预处理算法研究[D]. 杭州: 浙江大学, 2006. DAIJinglan. A research on preprocessing algorithms of mass point cloud[D]. Hangzhou: Zhejiang University, 2006.
[4]
谷晓英. 三维重建中点云数据处理关键技术研究[D]. 秦皇岛: 燕山大学, 2015. GUXiaoying. Research on the key technologies of point clouds processing in 3D reconstruction[D]. Qinhuangdao: Yanshan University, 2015.
[5]
张毅, 刘旭敏, 隋颖, 等. 基于K-近邻点云去噪算法的研究与改进[J]. 计算机应用, 2009, 29(4): 1011–1014. ZHANGYi, LIUXumin, SUIYing, et al. Research and improvement of denoising method based on K-neighbors[J]. Journal of Computer Applications, 2009, 29(4): 1011–1014.
[6]
封雷, 朱登明, 李兆歆, 等. 一种基于遮罩的稀疏点云滤波算法[J]. 计算机科学, 2022, 49(5): 25–32. FENGLei, ZHUDengming, LIZhaoxin, et al. Sparse point cloud filtering algorithm based on mask[J]. Computer Science, 2022, 49(5): 25–32.
[7]
刘大峰, 廖文和, 戴宁, 等. 散乱点云去噪算法的研究与实现[J]. 东南大学学报(自然科学版), 2007, 37(6): 1108–1112. LIUDafeng, LIAOWenhe, DAINing, et al. Research and implementation for denoising noisy scattered point data[J]. Journal of Southeast University (Natural Science Edition), 2007, 37(6): 1108–1112.
[8]
周煜, 张万兵, 杜发荣, 等. 散乱点云数据的曲率精简算法[J]. 北京理工大学学报, 2010, 30(7): 785–789. ZHOUYu, ZHANGWanbing, DUFarong, et al. Algorithm for reduction of scattered point cloud data based on curvature[J]. Transactions of Beijing Institute of Technology, 2010, 30(7): 785–789.
[9]
隋连升, 蒋庄德. 栅格型点云数据的自由曲面建模技术研究[J]. 计算机辅助设计与图形学学报, 2003, 15(10): 1293–1297. SUILiansheng, JIANGZhuangde. Free form surface modeling with grid cloud data[J]. Journal of Computer Aided Design & Computer Graphics, 2003, 15(10): 1293–1297.
[10]
贺美芳. 基于散乱点云数据的曲面重建关键技术研究[D]. 南京: 南京航空航天大学, 2006. HEMeifang. Research on key technologies of surfaces reconstruction based on scattered point cloud data[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2006.
张开源, 郑德华, 张崇军. 基于点云切片技术的曲面拟合方法研究[J]. 地理空间信息, 2018, 16(12): 35–37, 48, 9. ZHANGKaiyuan, ZHENGDehua, ZHANGChongjun. Research on the surface fitting method based on point cloud slicing[J]. Geospatial Information, 2018, 16(12): 35–37, 48, 9.
[13]
曾清红, 卢德唐. 基于移动最小二乘法的曲线曲面拟合[J]. 工程图学学报, 2004, 25(1): 84–89. ZENGQinghong, LUDetang. Curve and surface fitting based on moving least-squares methods[J]. Journal of Engineering Graphics, 2004, 25(1): 84–89.
[14]
付玮, 吴禄慎, 陈华伟. 基于免疫遗传和蚁群融合算法的散乱点云曲面拟合[J]. 农业机械学报, 2016, 47(12): 424–430. FUWei, WULushen, CHENHuawei. Scattered point clouds surface fitting based on immune genetic and ant colony algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12): 424–430.
[15]
LINA C, CHENC F. Point-data processing and error analysis in reverse engineering[J]. The International Journal of Advanced Manufacturing Technology, 1998, 14(11): 824–834.
[16]
WEIRD J, MILROYM J, BRADLEYC, et al. Reverse engineering physical models employing wrap-around B-spline surfaces and quadrics[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 1996, 210(2): 147–157.
[17]
来新民, 黄田, 曾子平, 等. 基于NURBS的散乱数据点自由曲面重构[J]. 计算机辅助设计与图形学学报, 1999, 11(5): 433–436. LAIXinmin, HUANGTian, ZENGZiping, et al. NURBS based approach of surface reconstruction from scattered data[J]. Journal of Computer Aided Design & Computer Graphics, 1999, 11(5): 433–436.
[18]
何华. 散乱点云数据三角网格曲面重建研究[D]. 郑州: 战略支援部队信息工程大学, 2018. HEHua. On triangle mesh surface reconstruction for scattered point clouds[D]. Zhengzhou: PLA Strategic Support Force Information Engineering University, 2018.
[19]
FARING. Curvature continuity and offsets for piecewise conics[J]. ACM Transactions on Graphics, 1989, 8(2): 89–99.
[20]
王若莹, 邵利平. NURBS边界曲面直接生成法[J]. 计算机应用, 2008, 28(1): 174–176, 180. WANGRuoying, SHAOLiping. Direct generation method of NURBS boundary surface[J]. Journal of Computer Applications, 2008, 28(1): 174–176, 180.
[21]
张中岳, 周惠兴, 王舜, 等. 基于RANSAC的WTLSD平面拟合算法研究[J]. 国外电子测量技术, 2022, 41(6): 93–98. ZHANGZhongyue, ZHOUHuixing, WANGShun, et al. Research on algorithm of plane fitting of RANSAC–WTLSD[J]. Foreign Electronic Measurement Technology, 2022, 41(6): 93–98.
[22]
黄紫双. 基于NURBS的曲面拟合和优化方法研究[D]. 秦皇岛: 燕山大学, 2020. HUANGZishuang. Research on surface fitting and optimization method based on NURBS[D]. Qinhuangdao: Yanshan University, 2020.